Matek F405 WMO Flight Controller Ardupilot Inav F405-WMO









49,90 € *
54,90 € * (9,11% gespart)
inkl. MwSt. zzgl. Versandkosten
Lagerartikel, ca. 1-3 Werktage
Lieferzeit innerhalb Deutschlands
- Artikel-Nr.: PM-7219
- Hersteller: Matek Systems
- Artikelname: F405-WMO
- EAN: 4250902365745
FC Specifications
MCU: STM32F405RGT6, 168MHz , 1MB Flash
IMU: ICM42688-P
Baro:... mehr
Produktinformationen "Matek F405 WMO Flight Controller Ardupilot Inav F405-WMO"
FC Specifications
- MCU: STM32F405RGT6, 168MHz , 1MB Flash
- IMU: ICM42688-P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: SD card slot
- 4x UARTs
- 10x PWM outputs
- 1x I2C
- 2x ADC (VBAT, Current)
- 1x spare PINIO
- Vbat output ON/OFF control
- USB/Beep Extender with Type-C(USB2.0)
- Built in inverter on UART2-RX for SBUS input
Power
- 5.4~30V DC IN (2~6S LiPo)
- 132A Current Sense (INAV Scale 250, ArduPilot 40A/V)
- PDB/Current sense resistor: 90A continuous, 132A burst.
- BEC 5V(4v5) 2A for FC & Peripherals
- BEC Vx 4.5A cont.(7A peak) for servos, 5V/ 6V option
- Filtered Vbat for VTX and camera
- LDO 3.3V 200mA
- Battery Voltage Sensor: 1k:20k
FC Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE_SD
Physical
- Dimensions: 32 x 22 x 12.7 mm
- Weight: 9g
Including
- 1x F405-WMO
- 1x USB(Type-C)/Beep (Passive buzzer) Extender + 20cm JST-SH-6P cable for USB extender.
- Dupont 2.54 pins (Board is shipped unsoldered)
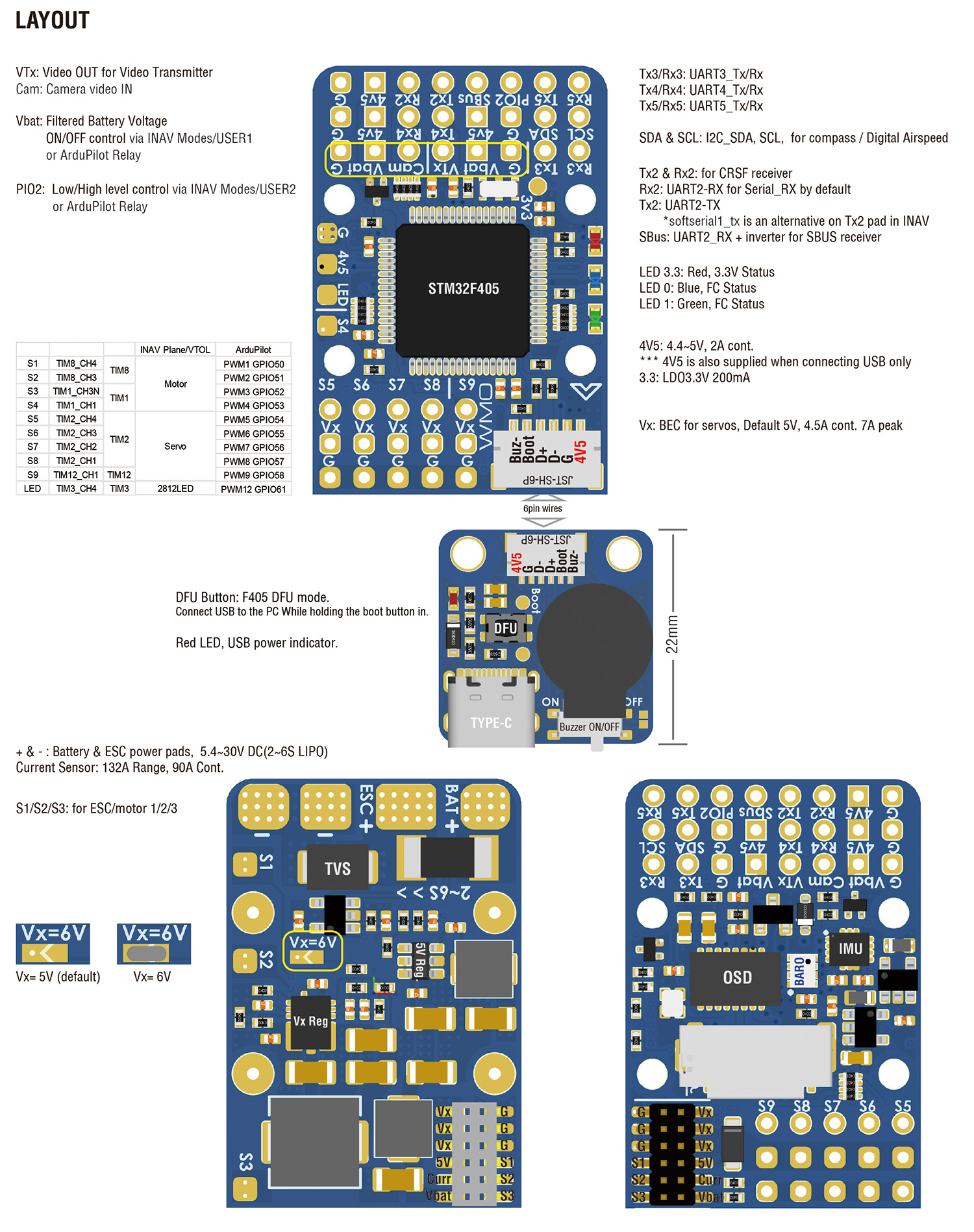
Layout
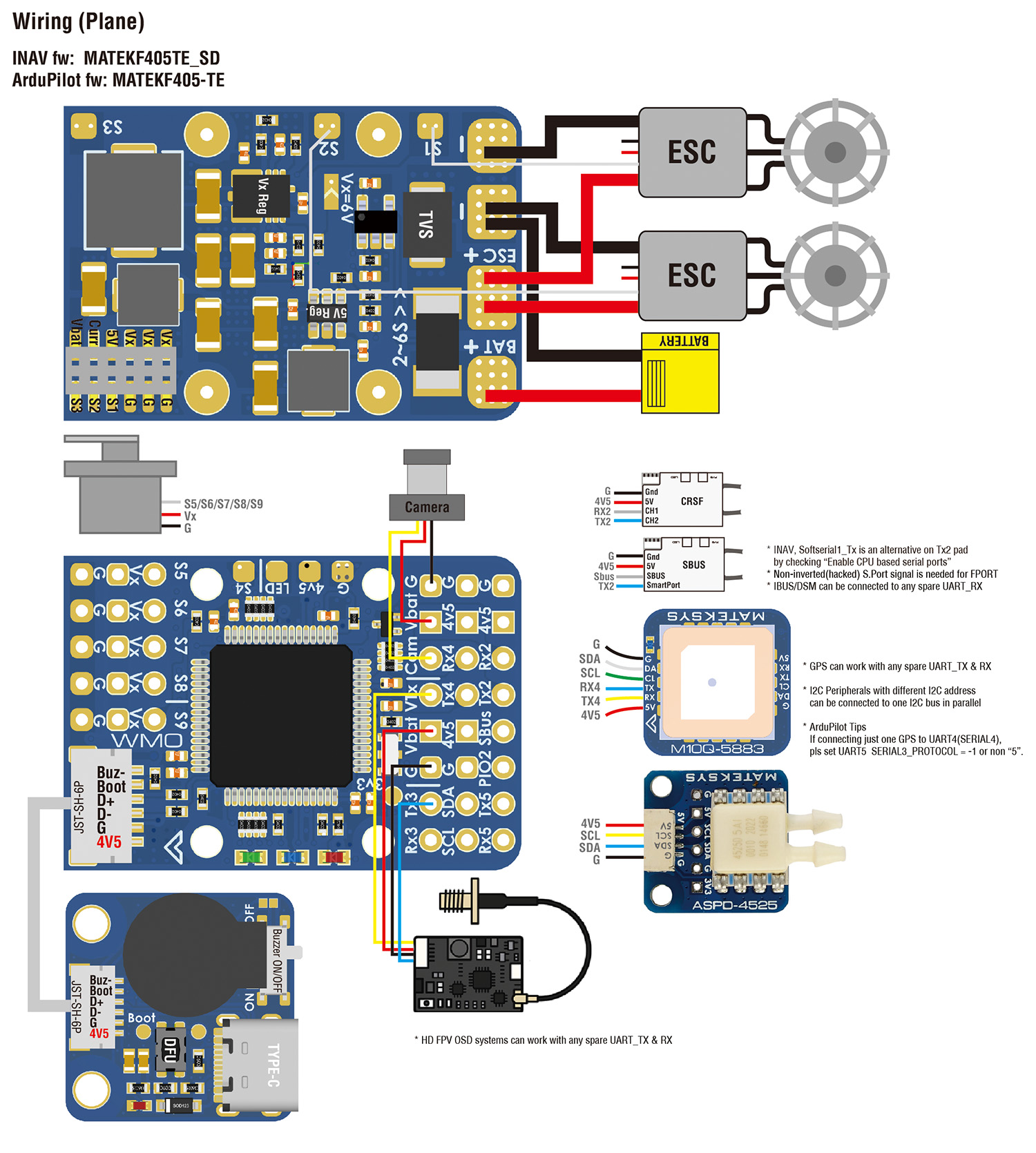
Wiring
INAV mapping
ArduPilot mapping
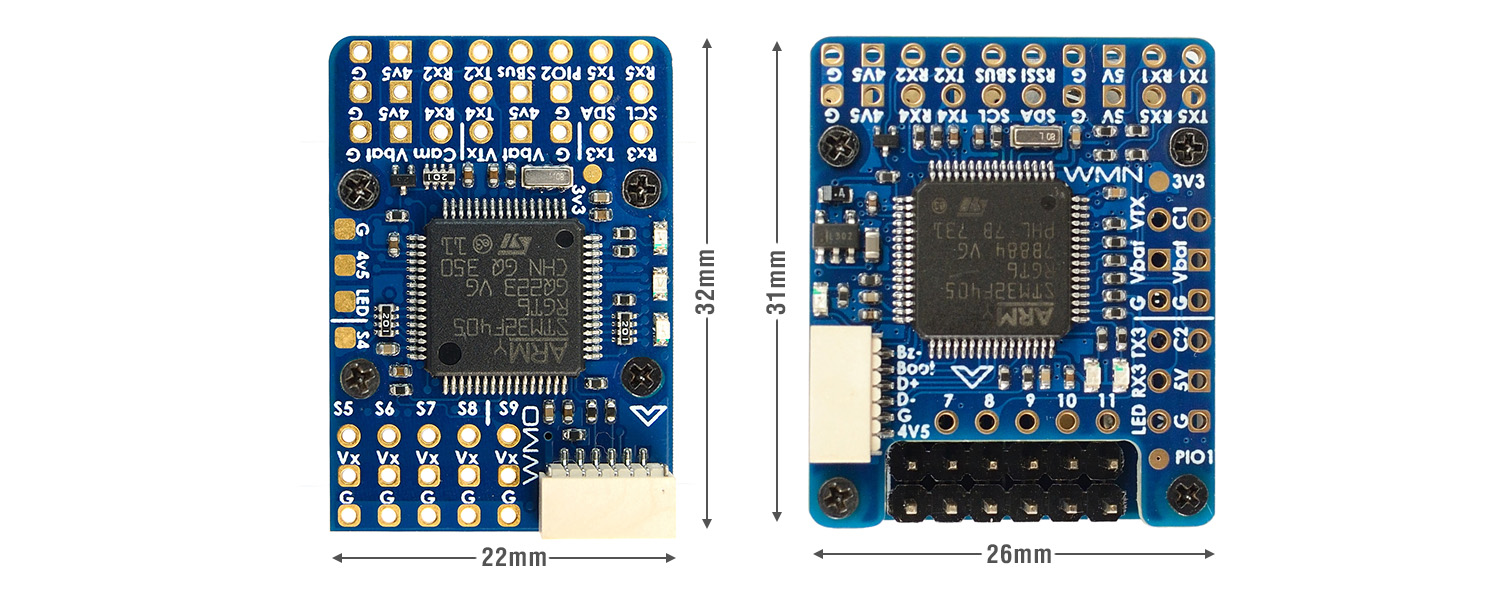
Difference from WMN
Weiterführende Links zu "Matek F405 WMO Flight Controller Ardupilot Inav F405-WMO"
Hersteller gemäß (GPSR (EU)2023/988):
Matek Systems Limited, Rm 1501 Grand Millennium Plaza 181 Queen S Road Central Hong Kong mateksys.com
Inverkehrbringer:
Premium-Modellbau Würch GmbH, Geschäftsführer: Steffen Würch, Torenstrasse 9, 88709 Meersburg, Deutschland, Tel: 07046 38795100, www.premium-modellbau.de
Bewertungen lesen, schreiben und diskutieren... mehr
Kundenbewertungen für "Matek F405 WMO Flight Controller Ardupilot Inav F405-WMO"
Bewertung schreiben
Bewertungen werden nach Überprüfung freigeschaltet.
- 5
Derzeit Ausverkauft

- 93
Derzeit Ausverkauft
 6x3 4x Propeller Carbon Verstärktes Nylon Multicopter Luftschraube 6030
6x3 4x Propeller Carbon Verstärktes Nylon Multicopter Luftschraube 6030
Inhalt
1 Stück
0,50 €
*
7,49 €
*
- 96
Nur noch 2 auf Lager !
- 93
Sofort lieferbar
- 94
Sofort lieferbar

Inhalt
1 Stück
0,19 €
*
2,99 €
*
Sofort lieferbar

- 79
Sofort lieferbar

Sofort lieferbar
")
Sofort lieferbar

Inhalt
1 Stück
ab 15,30 €
*
Sofort lieferbar

- 50
Sofort lieferbar

Sofort lieferbar

Nur noch 2 auf Lager !

Sofort lieferbar

Sofort lieferbar

Sofort lieferbar

Sofort lieferbar

Derzeit Ausverkauft

Sofort lieferbar

- 5
Sofort lieferbar

Sofort lieferbar

Sofort lieferbar

Sofort lieferbar

- 4
Variantenartikel

- 8
Sofort lieferbar

- 7
Nur noch 2 auf Lager !

Nur noch 2 auf Lager !
Sofort lieferbar

- 5
Derzeit Ausverkauft
Sofort lieferbar
- 13
Derzeit Ausverkauft

Inhalt
1 Stück
129,90 €
*
149,90 €
*
Sofort lieferbar

Sofort lieferbar

- 57
Nur noch 1 auf Lager !

Inhalt
1 Stück
9,90 €
*
22,90 €
*
Sofort lieferbar

- 11
Sofort lieferbar

Sofort lieferbar
Sofort lieferbar

Sofort lieferbar
Sofort lieferbar
- 5
Bestellartikel
NEU
")
- 5
Bestellartikel
NEU

- 5
Derzeit Ausverkauft

- 3
Sofort lieferbar

- 4
Bestellartikel

- 4
Bestellartikel

- 3
Bestellartikel

- 3
Bestellartikel

- 3
Bestellartikel
")
- 7
Sofort lieferbar

- 4
Nur noch 1 auf Lager !

Inhalt
1 Stück
1.499,90 €
*
1.569,90 €
*
- 3
Sofort lieferbar

- 7
Sofort lieferbar

- 26
Derzeit Ausverkauft

- 96
Sofort lieferbar
8x4.5 Quadcopter Propeller Luftschraube 1 Paar 8045 Orange CCW CW Hexacopter
Inhalt
1 Stück
0,15 €
*
3,49 €
*
Nur noch 1 auf Lager !
- 10
Sofort lieferbar

- 13
Bestellartikel

- 3
Sofort lieferbar

Inhalt
1 Stück
28,90 €
*
29,90 €
*
- 6
Bestellartikel

- 8
Sofort lieferbar
 300A - Side Entry 18139")
- 3
Sofort lieferbar

- 9
Sofort lieferbar

- 11
Derzeit Ausverkauft

Zuletzt angesehen