Drohnen selber bauen - Der Guide
Wie baue Ich eine Drohne selber?
Welche Drohne brauche Ich für meine Kamera, worauf muss Ich beim Bau meiner Drohne achten? Welche Motoren passen auf diesen Rahmen? Welchen Akku benötige Ich? Passt das alles so zusammen?
Diese und ähnliche Fragen erhalten wir täglich.
In diesem Guide wollen wir unsere Erfahrungen, Tipps und Tricks weitergeben um bei der erfolgreichen Zusammenstellung der ersten Drohne zu helfen.
!! Neu !! - Konfigurator - Schritt für Schritt zum passenden Multicopter Setup
Wir haben sehr viel positives Feedback zu unseren Guides erhalten. Viele Kunden haben unsere Tipps und Empfehlungen bereits umgesetzt und konnten sich ihren eigenen Multicopter realisieren. Um Interessierten nun noch besser helfen zu können, haben wir verschiedene Konfiguratoren erstellt mit welchen passende Setups Stück für Stück zusammengestellt werden können. Der Konfigurator prüft automatisch ob z.B. die Propeller auf den Rahmen passen oder ob der ausgewählte Motor mit der gewünschten Spannung betrieben werden kann. So lassen sich Fehlkäufe vermeiden und optimale Ergebnisse erzielen.
Um eine bessere Übersichtlichkeit zu gewährleisten wurden drei verschiedene Konfiguratoren erstellt. Bei den ersten beiden handelt es sich um Konfiguratoren für Tarot Quadcopter sowie Tarot Hexacopter Rahmen. Der dritte Konfigurator zielt auf gewerbliche Kunden ab und beinhaltet das komplette T-Motor Sortiment an größeren Motoren, Carbon Propellern und Reglern.
Profitieren Sie zudem von einem Rabatt beim Kauf mehrerer Artikel.
Hier gehts zum Tarot Quadcopter Konfigurator
Hier gehts zum Tarot Hexacopter Konfigurator
Hier gehts zum T-Motor Setup Konfigurator für professionelle Multicopter Antriebssets
Aktualisiert am 18.03.2020
Inhaltsverzeichnis - Selbstbau einer Drohne
- 1. Drohnen Definition:
- 2. Welche Drohne passt zu mir / zu meinem Einsatzzweck?
- 3. Wie schwer ist es eine Drohne zu bauen? - Kann Ich das Ganze überhaupt?
- 4. Welche Komponenten sind in einer Drohne verbaut?
- 5. Was brauche Ich sonst noch an Werkzeug?
- 6. Schritt für Schritt Zusammenstellung einer Videodrohne.
- 6.1 Anwendungszweck definieren und Budget festlegen:
- 6.2 Sind bereits Komponenten vorhanden oder wird bei „Null“ begonnen?
- 6.3 Welche Fernsteuerung benötige Ich?
- 6.4 Wieviel Schub ist überhaupt notwendig, dass eine Drohne fliegt?
- 6.5 Kann Ich meine Drohne überdimensionieren?
- 6.6 Unser Tipp: Immer mit der Nutzlast / Anwendung starten:
- 7. Musterberechnung einer Drohne anhand eines Beispiels aus der Praxis:
- 7.1 Die ersten Überlegungen zum Setup:
- 7.1.1 Überlegungen zur Nutzlast:
- 7.1.2 Die Wahl der Bauform und des Rahmens:
- 7.1.3 Die Wahl des passenden Antriebes für unsere Drohne:
- 7.1.3.1 Vorüberlegungen und technischer Hintergrund:
- 7.1.3.2 Userfrage: Was bedeutet z.B. 13x5.5 bei einem Propeller?
- 7.1.3.3 Userfrage: Was bedeudet CW und CCW bei Propellern?
- 7.1.3.4 Userfrage: Wieso gibt es keine Daten für z.B. 5S sondern wird direkt von 4S auf 6S gesprungen?
- 7.1.3.5 Wahl der richtigen Spannung für die Drohne:
- 7.1.3.6 Zusammenfassung unserer bisherigen Ergebnisse:
- 7.1.3.7 Auswahl von Motoren und Propellern:
- 7.1.4 Die Wahl der Brushless Regler (ESCs):
- 7.1.5 Die Wahl des passenden Flight Controllers (Multicopter Steuerung):
- 7.1.6 Die Wahl des passenden Lipo Akkus:
- 7.1.7 FPV Komponenten:
- 7.1.8 Sonstige Komponenten und Kleinteile:
- 7.2 Ergebnis unseres Setups und Anmerkungen:
- 7.3 Für Fortgeschrittene: Detaillierte Berechnungen zur Optimierung der Flugzeit:
- 7.1 Die ersten Überlegungen zum Setup:
- 8. Könnt Ihr mir nicht eine Drohne zusammenstellen oder konkrete Empfehlungen geben?
- 9. 9. Bietet Ihr auch Komplettsets - Ready to Fly (RTF) an?
- 9. Rechtliche Bestimmungen zum Betrieb:
1. Drohnen Definition:
1.1 Was ist eine Drohne?
1.2 Drohne / Multicopter / FPV Racing / Quad? Worin liegt der Unterschied?
Oftmals kommt die Frage auf: was ist nun eigentlich der Unterschied zwischen einer Drohne und einem Multicopter und ist ein Quadcopter wieder etwas anderes?
Multicopter bedeutet vom Begriff her, dass es sich um ein Modell mit mehreren Rotoren handelt, es kann sich also um einen Tri, Quad, Hexacopter oder Octocopter handeln. Wie diese Modelle genau aussehen und aufgebaut sind erklären wir im Punkt 2.1. Der Begriff ist also allgemein gehalten und bezeichnet keine genaue Bauform.
Vor allem im englischen Sprachraum ist "drone" Synonym sowohl für militärische Einsatzzwecke als auch für den Modellbaubereich, dort wird der Begriff "multicopter" eher selten verwendet. Die Presse hat dies mittlerweile aufgegriffen und bezeichnet alle Arten von Modellbau Multicoptern und auch Spielzeug pauschal als "Drohne". Auch mehr und mehr Hersteller bewerben ihr Produkt als Drohne. Zu Beginn dieser Entwicklung standen viele Modellbauer diesem Trend kritisch gegenüber da befürchtet wurde, dass ein Hobby und Freiprodukt nun mit militärischen Produkten assoziiert wird.
Durch die zunehmende Popularität von FPV Racing oder auch FPV Drone Racing wird der Begriff aber nun mehr und mehr vom Sportgedanken geprägt. Da es sich hier oftmals auch um internationale Veranstaltungen handelt dominiert dort ebenfalls der Begriff "Drone Racing". Unter FPV Racing versteht man kleinere Modelle (meistens Quadcopter mit einem Durchmesser von unter 30cm), welche sehr stark motorisiert sind und rein über das Kamerabild geflogen werden. Der Pilot hat permanent eine FPV-Brille auf und fliegt das Modell nicht mehr auf Sicht sondern quasi aus der Pilotenperspektive. Es wird mit mehreren Piloten auf einem durch Hindernisse und Markierungen abgesteckten Kurs um die Wette geflogen.
Mini Quad und Mini / Micro FPV Racer sind besonders kleine FPV Racer welche zum Teil auch indoor eingesetzt werden können.
2. Welche Drohne passt zu mir / zu meinem Einsatzzweck?
Der hier beschriebene Artikel legt den Fokus auf den Bau und die Zusammenstellung eines Videocopters, also einer Drohne, die für Bild und Videoaufnahmen gedacht ist. Natürlich kann die Vorgehensweise auch auf eine Drohne ohne Kamera oder eine Drohne mit einer anderen Nutzlast übertragen werden.
Wer einen FPV Racer bauen möchte kann sich zwar an ein Paar der Grundberechnungen orientieren und sich die Tipps mit anschauen, die Vorgehensweise für die Zusammenstellung ist aber eine andere weshalb wir das Thema Zusammenstellung einer FPV-Racing Drohne in einem separaten Artikel behandeln werden.
2.1 Welche Arten von Drohnen gibt es?
Das Hauptmerkmal zur Unterscheidung der Art der Drohne ist die Anzahl der verwendeten Motoren / Propeller. Die Anzahl der Motoren ist dann ebenso namensgebend für die meisten Modelle:
2.1.1 Quadcopter:
Die Art, die man am häufigsten sieht ist der Quadcopter, der oft auch als Quadrocopter bezeichnet wird. Dieser Begriff wird aus dem Lateinischen abgeleitet (quadrum ist das Viereck). Wie es der Name bereits vermuten lässt werden beim Quadcopter vier Motoren und vier Propeller auf einer Ebene ausgerichtet. Die logische Konsequenz dieser Anordnung ist ein recht stabiles Flugverhalten. Jeweils zwei sich gegenüber liegende Motoren drehen sich gegen den Uhrzeigersinn, bzw. drehen sich im Uhrzeigersinn.
Es gibt zwei verschiedene Bauformen. Die X-Bauform (Die Motoren sind in einem X angeordnet ) sowie die + Bauform (Motoren sind in einem + angeordnet). Nachteil der + Bauform ist allerdings, dass bei Montage eines Gimbals der vordere Arm im Weg ist und unter Umständen stört oder sogar im Bild zu sehen wäre, daher wird eigentlich ausschließlich eine X-Variante eingesetzt. Nachteil von allen Quadcoptern ist, dass keinerlei Ausfallsicherheit besteht. Sollte ein Motor ausfallen bedeutet dies unweigerlich den Absturz da die restlichen drei Motoren die Drohne nicht mehr stabilisieren können.
 Quadcopter in X Bauform und Quadcopter in Bauform
Quadcopter in X Bauform und Quadcopter in Bauform
2.1.2 Hexacopter
Eine weitere Art eines Multicopters stellt der Hexacopter dar. Die Silbe Hexa kommt aus dem Griechischen und steht für die Zahl sechs. Bei einem Hexacopter handelt es sich demnach um eine Drohne mit sechs Motoren und sechs Propellern. Auch hier werden alle Motoren auf einer Ebene angeordnet. Durch die höhere Anzahl an Armen, Motoren und Propellern kommt es hier in der Regel zu einem höheren Gesamtgewicht der Drohne. Dies wiederum führt zu einer höheren möglichen Zuladung und zu einem ruhigeren Flugverhalten, im Vergleich zum Quadcopter.
Oftmals wird in Verbindung mit Hexacoptern von einer erhöhten Redundanz gesprochen. Dies ist so zu verstehen: Hat man eine höhere Zahl an Motoren und Propellern zu Verfügung und setzt eine spezielle Flugsteuerung ein, so kann bei einem Ausfall eines Motors mit Hilfe der anderen funktionstüchtigen Motoren dieser Ausfall kompensiert werden. Auch hier gibt es wie beim Quadcopter eine X und eine I Bauform, wobei die I-Bauform auf Grund des sich im Bild befindlichen Armes ebenfalls kaum eingesetzt wird.
 Hexacopter in X Bauform und Hexacopter in I Bauform
Hexacopter in X Bauform und Hexacopter in I Bauform
2.1.3 Octocopter (Flat 8) und X8 (Koax Bauform)
Soll die Motorenanzahl noch größer ausfallen befinden wir uns im Bereich der Octocopter. Die Silbe Octo kommt auch wieder aus dem Griechischen und steht für die Zahl acht. Demzufolge haben wir es mit einem Mulitcopter mit acht Motoren und acht Propellern zu tun.
Bei einem Flat 8 sind erneut alle Motoren auf einer Ebene angebracht. Vier Motoren drehen sich im Uhrzeigersinn und vier Motoren drehen sich gegen den Uhrzeigersinn. Auch hier gibt es die Möglichkeit, dass die Arme in einem V oder einem I angeordnet sind, wobei die V-Bauform deutlich häufiger anzutreffen ist. In der Regel handelt es sich bei Octocoptern um Muliticopter mit einem recht großen Rahmen.
Der Nachteil eines Flat 8 ist somit der enorme Platzbedarf da die Arme entsprechend groß sein müssen, sodass die Propeller nicht streifen. Baugrößen von über einem Meter sind hier keine Seltenheit. Diese Art von Drohnen werden daher gerne im professionellen Bereich eingesetzt. Durch die große Anzahl von Motoren haben wir auch hier wieder ein besonders ruhiges Flugverhalten und große Zuladungsmöglichkeiten. Auch das vorhin angesprochene Prinzip der Redundanz ist hier in Verbindung mit der richtigen Flugsteuerung gegeben. Ein typischer Einsatzweck wäre also zum Beispiel das Befördern einer großen Kamera zu Aufnahmezwecken.
Als Sonderform gibt es daher den X8 welcher über eine Koaxialbauform verfügt, dass bedeutet dass pro Arm ein Motor oben und ein Motor unten montiert sind, wobei beim unteren Motor die Propeller (und der Motor) dann Richtung Boden zeigen. Es handelt sich also im Grunde um zwei aufeinander montierte Quadcopter. Vorteil ist der Platzgewinn da von Bauraum nur die Abmessungen eines Quadcopters benötigt werden. Nachteil ist ein Effizienzverlust da die übereinanderliegenden Propeller voll gegenseitig im Luftstrom liegen. Auch die Kalkulation der Propeller ist nicht so trivial. Ein weiteres Problem ist, dass die unteren Propeller ein einziehbares Landegestell problematisch machen und unter Umständen auch das Kamerabild verdecken können.
 Octocopter Flat 8 in V und I Bauform sowie X8 in Koaxial Bauform
Octocopter Flat 8 in V und I Bauform sowie X8 in Koaxial Bauform
Sonderformen – Tricopter und Y6:
Zusätzlich zu den bisher genannten Modellen gibt es noch einige Sonderformen, welche sich über die Zeit mitentwickelt haben aber eher Sondermodelle darstellen oder für spezielle Anwendungen gedacht sind.
Als Besonderheit ist hier z.B. ein Tricopter zu nennen, also ein Modell mit nur drei Motoren. Diese Modelle fanden vor allem in der Anfangszeit der Multicopter Entwicklung häufiger Anwendung. Zur Stabilisierung verwendet diese Variante einen beweglichen Heckmotor, dieser wird dann geschwenkt und ebenfalls vom Flight Controller mit angesteuert.
Auf dem Tricopter aufbauend gibt es auch hier wieder eine Koax-Variante, nämlich einen Y6 sowie einen IY6.
Bei der Y Bauform sind vier Motoren vorne, beim I zwei. Die I-Bauform ist auf Grund der störenden doppelten Motoren im Bild kaum anzutreffen, der Y6 hingegen wird von einigen Anbietern nach wie vor eingesetzt.  Y6 Copter in IY und Y Bauform
Y6 Copter in IY und Y Bauform
2.2 Welche Einsatzzwecke gibt es?
Die Gründe und Motivationen sich für eine Drohne zu entscheiden sind unwahrscheinlich vielfältig.
Generell muss zwischen privaten und geschäftlichen bzw. professionellen Einsatzzwecken getrennt werden.
Im Privatbereich entscheiden sich Hobbypiloten meist für eine Drohne, da sie sich entweder für den FPV-Sport begeistern oder aber Landschaftsaufnahmen in Form von Fotos und Videos Ihrer Region oder aber im Urlaub machen wollen.
Im professionellen Bereich können ebenfalls tolle Ergebnisse in Sachen Videoaufnahmen erzielt werden. Sowohl Fotografen und auch die Film-Industrie bedienen sich mittlerweile gerne entsprechenden Drohnen um beispielsweise Luftaufnahmen, Werbespots oder Filmausschnitte zu drehen. Oftmals können hier enorme Einsparungen realisiert werden, da auf einen Helikoptereinsatz verzichtet werden kann.
Auch andere Gewerbezweige wie beispielsweise Architekten, Makler, Gutachter und Vermesser können von der Technik aus der Luft profitieren. Auf diese Art und Weise können dem Kunden aus einer anderen Perspektive Immobilien und Grundstücksflächen erläutert werden.
Des Weiteren können sämtliche technische Einrichtungen wie beispielsweise Hochstrommasten und Windräder vom Boden aus mit Hilfe einer Drohne sicher kontrolliert werden.
Einen weiteren wichtigen Beitrag zur Sicherheit können Drohnen in Einsätzen von Polizei, Feuerwehr und THW leisten.
Auch in der Forschung und Wissenschaft wird Drohen eine wichtige Rolle beigemessen. Viele Institute, Universitäten und Hochschulen forschen bereits seit geraumer Zeit.
Auch in Mitten der Natur gibt es ein breites Einsatzgebiet für Drohen. Ob in der Landwirtschaft zur Bekämpfung von Schädlingen, wie beispielsweise dem Maiszünsler, der mit Hilfe von Schlupfwespenlarven, die von der Drohne in regelmäßigen Abständen auf einem Feld verteilt werden, bekämpft wird bis hin zum Einsatz in Jagdrevieren zum Aufspüren von Wildschweinschäden.
Auch Vereine und Ehrenamt setzen vermehrt Drohnen ein. Ein besonders schönes Beispiel sind Vereine, die Rehkitze mit Hilfe von Drohen, die mit Wärmebildkameras ausgestattet wurden, aufspüren, sodass diese bevor ein Landwirt mäht in Sicherheit gebracht werden können.
Die Einsatzgebiete von Drohen sind unwahrscheinlich vielfältig. Für nahezu jeden Zweck kann eine Drohe gebaut und anschließend eingesetzt werden.
Wichtig ist allerdings immer verantwortungsvoll und vorsichtig mit einer Drohne umzugehen um die Gefährdung von anderen auf jeden Fall zu vermeiden.
3. Wie schwer ist es eine Drohne zu bauen? - Kann Ich das Ganze überhaupt?
Die Lust eine Drohe selber zu bauen bzw. selber zusammenzubauen ist geweckt und viele Interessierte stehen am Anfang vor der Frage: Kann ich das alles überhaupt?
Generell spricht vieles für das Selber-Machen: Es macht Spaß, man kann im Ernstfall, zum Beispiel nach einem Crash, selber etwas reparieren und Teile austauschen und man kann selbst entscheiden welche Komponenten man genau verwenden möchte.
Natürlich ist eine eigene Hobbywerkstatt oder ein Bastelkeller eine gute Voraussetzung und bringt in vielen Punkten, gerade was den Platz und das Vorhandensein von Maschinen und Equipment angeht mit Sicherheit Vorteile mit sich, vor allem wenn z.B. ein größerer Eigenbau geplant ist.
Dennoch können auch Drohnen in Form von Bausätzen und die zusätzlich notwendigen Komponenten wie Motoren, Regler, Propeller, ... auch ohne diese Voraussetzungen gut zusammengebaut und anschließend geflogen werden. Ein Arbeitstisch und etwas Platz sind vollkommen ausreichend.
Hilfestellungen wenn man zu Hause nicht weiter kommt oder sich nicht sicher ist gibt es mittlerweile, gerade durch die zunehmende Beliebtheit des Hobbys, viele.
Wir empfehlen: Immer lieber nachfragen und sich informieren, wenn man sich beispielsweise mit dem Anschluss von Komponenten nicht sicher ist. Leider ist es nämlich so, dass durch eine kleine Unachtsamkeit ein teurer Schaden entstehen kann.
Generell sind wir als Händler sowohl vor dem Kauf bei der Auswahl der Komponenten immer gerne beratend tätig. Auch nach dem Kauf können Kunden sich gerne mit Fragen an uns wenden.
Auch im Internet gibt es mittlerweile viele YouTube –Videos und Tutorials, die gerade bei technisch komplizierteren Produkten sehr hilfreich sein können. Ein gutes und aussagekräftiges Video, welches Schritt für Schritt die Vorgehensweise zeigt ist einer Anleitung auf Papier weit voraus. Des Weiteren gibt es sehr empfehlenswerte Blogs und auch Foren, die sich mit nahezu jedem erdenklichen Produkt beschäftigen. Einfach einmal danach googeln.
Auf jeden Fall sinnvoll ist auch das Fliegen mit Gleichgesinnten in einem Verein. Dort kann man schnell auch gemeinsam mit Freunden Hürden überwinden und viel von anderen dazu lernen.
Wir wünschen viel Freude am neuen Hobby!
4. Welche Komponenten sind in einer Drohne verbaut?
An dieser Stelle möchten wir einen kurzen Überblick über die in einer Drohne verbauten Komponenten geben. Im späteren Bauverlauf werden die Komponenten einzeln detailliert beleuchtet.
Die Grundlage für alle weiteren Komponenten bildet der Rahmen oder auch Frame genannt. Er dient dazu die Komponenten sinnvoll zu befestigen und trägt auch maßgeblich mit zur Erscheinung der Drohne bei. Ein Frame sollte stabil und leicht sein. Aus diesen Grund sind mittlerweile viele Frames aus Carbon gefertigt.
Ein weiterer wichtiger Bestandteil der Drohne sind die verbauten Motoren. In Multicoptern werden sogenannte Brushless Motoren verbaut. Die Auswahl an Motoren ist mittlerweile enorm und reicht vom wenigen Gramm schweren Micro Motor bis zu Motoren mit über 1kg Eigengewicht.
Auf den Motoren werden die Propeller montiert. Die Propelleranzahl entspricht der Motorenanzahl. Jedoch muss bei den Propellern darauf geachtet werden, dass zum Beispiel bei einem Quadcopter immer zwei Propeller linksdrehend und zwei Propeller rechtsdrehend sind und dass diese korrekt montiert werden. Propeller gibt es aus vielen verschiedenen Materialien. Preiswerte Propeller sind aus ABS, Nylon oder GFK Mischungen, hochwertige (und größere) Propeller werden aus Carbon gefertigt.
Unter einem Regler oder einem ESCs versteht man ein elektronisches Bauteil, welches Signale in einer speziellen Abfolge an die verbauten Motoren sendet, damit sich diese drehen. Pro Motor wird ein Regler verwendet.
Um die Drohe mit Energie zu versorgen wird ein Akku benötigt. Nahezu ausschließlich werden LiPo (Lithium Polymer) Akkus verwendet. An dieser Stelle sei bereits darauf hingewiesen, dass ein verantwortungsvoller Umgang, was die Lagerung und die Benutzung betrifft unbedingt erforderlich ist.
Um die Drohne zu steuern bedarf es einer Flugsteuerung bzw. eines Flight Controllers. Die Hauptaufgabe dieser Komponente ist es die Drohne zu stabilisieren und die Motoren und Regler anzusteuern.
Der Empfänger hat die Aufgabe die Signale der Fernsteuerung zu empfangen und diese an die Flugsteuerung weiterzuleiten.
Gimbal mit Kamera. Unter einem Gimbal versteht man ein Gestell in dem die Kamera montiert wird. Das Gimbal stabilisiert die Kamera während des Fluges sodass wackelfreie Bilder möglich sind. Es gibt auch Modelle welche zusätzlich per Fernsteuerung gesteuert werden können, sodass der Pilot während des Fluges die Kamera drehen und schwenken kann.
Des Weiteren werden noch einige andere Komponenten benötigt, die den Flug einer Drohne möglich machen, sich aber nicht unmittelbar „an Bord“ befinden. Zu nennen wären hier noch eine Fernsteuerung, ein Ladegerät und zum Beispiel ein FPV Monitor oder eine FPV-Brille.
5. Was brauche Ich sonst noch an Werkzeug?
An Werkzeug werden zur Montage des Rahmens vor allem verschiedene Schraubendreher (meistens Inbus) verwendet. Auch eine Zange, Pinzette und ein Seitenschneider sind hilfreich um etwas festzuhalten oder ein Kabel oder einen Kabelbinder einzukürzen.
Fast unumgänglich ist auch ein Lötkolben mit Zubehör. Die Lötarbeiten sind allerdings relativ einfach da oft nur Kabel miteinander verlötet werden müssen oder ein Kabel auf einer Platine verlötet wird. Trotzdem sollten absolute Anfänger erst einmal an ein Paar „Opferkabel“ üben bevor ggfs. der neue Brushless Regler durch zu viel Hitze oder falsche Anwendung beschädigt wird.
Gerade bei Schraubendrehern sollte man sofern man öfters etwas baut schon auf Qualität achten. Nichts ist ärgerlicher als ein Kratzer im Carbonrahmen oder eine ausgedrehte Schraube weil der Schraubendreher nicht 100% gepasst hat oder die Zange nicht sauber schließt.
Es muss ja nicht gleich ein Werkstattwagen von Hazet oder Gedore sein ;-)
Eine solide Grundausstattung an Schraubendrehern, Zangen sowie Lötkolben, Pinzette usw. sind vollkommen ausreichend.
Auch ein kleiner Heißluftfön erleichtert bei häufigeren Arbeiten das Einschrumpfen von Komponenten mit Schrumpfschlauch deutlich.
6. Schritt für Schritt Zusammenstellung einer Videodrohne
6.1 Anwendungszweck definieren und Budget festlegen:
6.1.1 Was möchte Ich mit der Drohne genau machen?
Am Anfang steht zunächst eine klare Definition des Anwendungszwecks. Handelt es sich lediglich um einen „Schnupperausflug“ in die Welt der Multicopter? Bin Ich vielleicht schon Flächenflieger und möchte einmal etwas Neues probieren? Oder bin Ich auf der Suche nach eine professionellen Lösung für einen spezifischen Anwendungszweck?
6.1.2 - 10 Punkte um meinen Anwendungszweck zu definieren:
Bei uns lautet die Devise: Die Drohne muss zum Anwender und zum Einsatzzweck passen.
Aus diesem Grund haben wir uns einen 10 Punkte-Katalog überlegt. Der Kunde sollte sich in Ruhe mit diesen 10 Punkten befassen um sich selbst im Klaren zu sein, was er persönlich möchte bzw. damit wir wissen, was für eine Drohne wir anbieten dürfen.
Los geht es mit den Abmessungen der Drohne. Hier bedarf es ein paar Überlegungen wie die Drohne später transportiert werden soll. Soll diese in einem speziellen Koffer oder lose transportiert werden? Muss diese evtl. klappbar sein, damit sie zum Beispiel in den Kofferraum passt? Wo bewahre ich die Drohen zu Hause sicher auf?
Das maximale Abfluggewicht: Hier muss genau abgeklärt werden ob ein gewisses Gewicht oder eine Grenze eingehalten werden muss. Beispielsweise ist aufgrund der aktuellen Entwicklungen auf die 2-Kilo-Grenze hinzuweisen.
Welche Nutzlast in Gramm soll ermöglicht werden? An dieser Stelle muss also überlegt werden, mit welchen zusätzlichen Komponenten der Anwender sofort oder auch in der Zukunft die Drohne ausstatten möchte. Hier seien zum Beispiel ganz klassisch ein Gimbal und eine spezielle Kamera genannt.
Art der Nutzlast: Bei einigen Anwendern geht die Nutzlast über die angesprochenen und klassischen Komponenten wie ein Gimbal und eine Kamera hinaus. In der Landwirtschaft muss zum Beispiel eine Box mit Schlupfwespenlarven mit einem gewissen Gewicht in die Nutzlast mit eingeplant werden. Viele verschiedene Nutzlastkomponenten sind denkbar.
Um dem Einsatzzweck oder den persönlichen Vorlieben gerecht zu werden gibt es den Punkt gewünschte Features und Sonderoptionen. Eine 6-Achsen-Stabilisierung ist mittlerweile Standard, aber der Kunde möchte zum Beispiel GPS, eine gute Bildstabilisierung in Form einer Gimbal, ein elektrisches Landegestell und einen Rahmen aus Carbon. Außerdem ist noch Zubehör in Form einer Fernsteuerung gewünscht und vorhandene Komponenten sollen weiter verwendet werden. Dieser Punkt ist sehr wichtig, um die Drohe für den Anwender sinnvoll und komfortabel auszustatten.
Die Nutzungshäufigkeit: Benutze ich die Drohne sehr häufig, zum Beispiel täglich oder mehrmals die Woche im Job oder fliege ich nur dann und wann und kann mir den Flugzeitpunkt im Endeffekt aussuchen? Dieser Punkt ist ebenfalls sehr wichtig, beispielsweise wenn die Komponenten einem starken Verschleiß unterliegen sodass bei Bedarf Ersatzteile gekauft werden können.
Gerade wenn die Drohne häufig oder gewerblich genutzt werden soll und entsprechende Werte und teures Kameraequipment verbaut wurde ist der Punkt der Ausfallsicherheit besonders wichtig. Hier kann zum Beispiel von vorn herein auf ein Modell und Komponenten mit hoher Ausfallsicherheit gesetzt werden. Des weiteren können Sicherheitssysteme wie selbstständiges Landen bei niedrigem Akku oder Return to Home (RTH) bei einem Verbindungsabbruch integriert werden.
Bei vielen Anwendungen dreht sich das Setup der Drohe oft um den Punkt der gewünschten Flugzeit. Beispielsweise benötigt man die Minutenanzahl x um eine gewisse Strecke oder Fläche mit einer Akkuladung abzufliegen. Des Weiteren ist vielleicht eine gewisse Reichweite oder Flug-Entfernung notwendig.
Das Prinzip der Aufrüstbarkeit: Möchte man evtl. zunächst noch ohne Gimbal und Kamera starten sollte man sich dennoch vor dem Kauf genau überlegen, ob dies nicht doch eine Möglichkeit in der Zukunft sein könnte. Besser man dimensioniert die Drohe für den Anfang her etwas über und hat dann später doch noch die Möglichkeit sich für eine zusätzliche Nutzlast zu entscheiden. Diese kann dann, sofern möglich, relativ unproblematische umgesetzt werden.
Ein weiter wichtiger Punkt ist noch das Budget. Wie viel kann ich oder möchte ich für die Drohe ausgeben? Habe ich evtl. gewisse Präferenzen? Zum Beispiel möchte ich wenn möglich sehr gute Motoren, bin aber mit einem günstigeren Rahmen zufrieden. Wir haben diese ganzen Überlegungen in einen 10 Punkte Katalog zusammengefasst welcher ein Grundgerüst bildet und anhand dessen erste Vorüberlegungen getroffen werden können.
10 Punkte um den Anwendungszweck einer Drohne zu definieren
- Abmessungen:
- Maximales Abfluggewicht:
- Gewünschte Nutzlast in g:
- Art der Nutzlast:
- Gewünschte Features / Sonderoptionen:
- Nutzungshäufigkeit:
- Ausfallsicherheit:
- Gewünschte Flugzeit:
- Aufrüstbarkeit:
- Budget:
6.2 Sind bereits Komponenten vorhanden oder wird bei „Null“ begonnen?
Hier ist natürlich auch wieder zu unterscheiden ob man ganz frisch in dieses Hobby einsteigt oder evtl. schon Modellbau betreibt.
In diesem Punkt muss natürlich immer abgewogen werden ob es Sinn macht die Komponenten weiterzuverwenden oder ob ein lieber auf besser geeignete Produkte umgestiegen werden sollte.
Ein Ladegerät (sofern von den Daten ausreichend) ist in der Regel sehr langlebig und kann z.B. oftmals noch verwendet werden.
Auch eine Fernsteuerung die vorher für Flugmodelle oder Helis eingesetzt wurde, bietet normalerweise genügend Kanäle um problemlos genutzt werden zu können. Es sollte sich aber auf jeden Fall bereits um ein 2,4Ghz Modell handeln. Alternativ gibt es z.B. auch von Frsky sehr gute Sender und preiswerte Sender mit denen viele Funktionen abgedeckt werden können.
Bei Akkus hingegen sollte immer geschaut werden ob diese auch wirklich zur Anwendung passen oder ob eine Neuanschaffung nicht doch sinnvoller ist um das volle Potential der Drohne zu nutzen. Es ist z.B. wenig sinnvoll zu versuchen den neuen 1 Meter Octocopter um ein Paar kleine 5 Jahre alte 3S Lipos herumzuplanen, hier würde man sich einfach zu sehr einschränken und bereits zu Beginn unnötige Kompromisse eingehen.
6.3 Welche Fernsteuerung benötige Ich?
Zum Thema passende Fernsteuerung kann man mit Sicherheit einen eigenen Artikel schreiben, wir werden hier nur kurz auf die Möglichkeiten eingehen und den Fokus mehr auf den reinen Multicopter legen.
Sofern wir von der reinen Flugfunktion ohne Zusatzoptionen ausgehen reicht für den Anfang ein Sender mit mindestens 6 Kanälen.
Sollen noch Kamera, FPV, Abwurf, Landegestell, hinzukommen ist natürlich ein größerer Sender wünschenswert. Wir verwenden sehr gerne Fernsteuerungen von Frsky hier gibt es bereits sehr preiswert qualitativ hochwertige Sender welche auch den Preisvergleich mit deutlich teureren Modelle nicht zu scheuen brauchen.
Für Einsteiger wäre z.B. die Q X7 eine Möglichkeit:
 FrSky Taranis Q X7 in der Farbe Schwarz
FrSky Taranis Q X7 in der Farbe Schwarz
Oder alternativ die Taranis X9D+ oder die X9D+ in der Special Edition:
 FrSky Taranis X9D+ Special Edition 2019 mit ACCESS in der Farbe Carbon Fiber
FrSky Taranis X9D+ Special Edition 2019 mit ACCESS in der Farbe Carbon Fiber
Wer sich mit dem Thema FrSky Fernsteuerungen noch mehr auseinandersetzen möchte, dem empfehlen wir unseren sehr ausführlichen FrSky Produktratgeber. Dort werden alle Frsky Taranis Fernsteuerungen ausführlich vorgestellt. Zudem bieten wir immer aktuelle Tabellen an, welche die einzelnen Features der Fernsteuerungen vergleichen (z.B. Anzahl der Schalter, Sonderfunktionen, Lieferumfang,...), sodass die Entscheidung bei der Auswahl erheblich erleichtert wird.
Hier gehts zum FrSky Produktratgeber
6.4 Wieviel Schub ist überhaupt notwendig, dass eine Drohne fliegt?
Im Unterschied zu einem Flugmodell muss eine Drohne zum einen immer senkrecht starten, zum anderen bietet der Rahmen keinerlei Auftrieb. Daher ist es nicht verwunderlich dass ein deutlich höheres Schub-Gewicht-Verhältnis benötigt wird.
Was ist überhaupt ein Schub-Gewicht-Berhältnis?
Das Schub-Gewicht-Verhältnis sagt aus wieviel Schub im Verhältnis zum Gewicht zur Verfügung steht. Bei einem Gewicht von 2kg und einem Schub von 2kg wäre das Verhältnis somit 1:1. Bei einem Gewicht von 2kg und einem Schub von 4kg liegt das Verhältnis bei 2:1, usw.
Ab einem Verhältnis von leicht über > 1:1 würde man theoretisch abheben und könnte schweben (äußere Einflusse wie Wind, usw. einmal ausgeblendet). Für einen Steigflug mit Reserven ist dies aber noch nicht ausreichend. Für einen Videocopter ist man mit der Faustregel 2:1 gut beraten, d.h. es sollte immer mindestens doppelt so viel Schub wie Abfluggewicht zur Verfügung stehen.
Durch Innovationen auf dem Gebiet der Brushless Motoren und LiPo Akku sind die heutigen Drohnen überhaupt erst flugfähig geworden. Zwei Punkte gibt es dennoch zu Bedenken welche dem Betrieb mit einem Akku geschuldet sind: Zum einen nimmt, im Gegensatz zu einem manntragenden mit Kerosin betriebenen Flugzeug oder Helikopter das Verhältnis auf Grund des sich leerenden Tanks nicht weiter zu, sondern sogar noch ab, da sich während des Fluges die Spannung des Akkus nach und nach verringert bis die Abschaltgrenze erreicht wird. Zum Anderen sind LiPo Akkus auch von der Außentemperatur abhängig. In einer kalten Umgebung sind diese weniger leistungsfähig. Und natürlich spielen Wettereinflüsse wie z.B. Wind bei einem Modell eine noch viel größere Rolle als in der tragenden Luftfahrt.
Faustregel für das Schub-Gewicht-Verhältnis von Videodrohnen:
Als Faustregel ist für einen Videocopter ein Schub-Gewicht-Verhältnis von mindestens 2:1 zu empfehlen.
6.5 Kann Ich meine Drohne überdimensionieren?
Dies ist eine Frage welche wir auch sehr häufig erhalten. Beim Stöbern auf unserer Webseite wird z.B. ein großer 810er oder 900er Tarot Rahmen gefunden welcher dem Kunden optisch sehr gut gefällt. Nachdem wir dann den Anwendungszweck geklärt haben stellt sich heraus, dass ein deutlich kleineres Modell eigentlich vollkommen ausreichen würde, da z.B. zunächst gar keine und später lediglich eine kleine Action Kamera transportiert werden soll.
Grundsätzlich kann man natürlich auch einen 10kg Octocopter nutzen um eine GoPro mit Gimbal zu transportieren, man erkauft sich damit allerdings ein Paar Nachteile.
Zum einen ist ein Rahmen dieser Größe entsprechend stabil aufgebaut was zwangsweise ein gewisses Eigengewicht mit sich bringt. Dies erfordert dann auch automatisch größere Motoren, Propeller und Regler. Um das Ganze dann zu betreiben werden größere Akkus benötigt, welche um in einer angemessenen Zeit geladen werden zu können natürlich auch ein passendes Ladegerät voraussetzen.
Ein Sprung in eine größere Copterklasse zieht also allerhand nach sich.
Unsere Empfehlung ist daher immer eine gewisse Reserve mit einzuplanen um ggfs. zukünftige Anwendungen auch mit abzudecken, eine völlige Überdimensionierung würden wir allerdings nicht empfehlen.
Vom zusätzlichen Budget einmal abgesehen erkauft man sich unter Umständen dann auch noch weitere Nachteile. Hier sind vor auch noch die rechtlichen Gegebenheiten zu nennen, sodass sich der Kunde mit einem zu schweren Copter unter Umständen stark in der Nutzung einschränken würde, ohne dass dies notwendig wäre.
6.6 Unser Tipp: Immer mit der Nutzlast / Anwendung starten:
Nachdem wir anhand der 10 Punkte schon einmal einen guten Überblick gewonnen haben ergibt sich schon automatisch ein grobes Bild was unsere Drohne alles können „muss“ und welche Funktionen wünschenswert wären.
Unsere Empfehlung ist dann nach Möglichkeit immer mit der Nutzlast (Payload) oder gewünschten Anwendung zu starten, hier ist der Autokauf ein guter Vergleich. Benötige Ich viel Kofferraum Volumen ist ein Kombi oder SUV denkbar geeigneter als ein Cabrio.
Die geplante Nutzlast gibt uns vor allem auch andere wichtige Eckdaten, welche zu beachten sind, wie z.B. ggfs. eine notwendige Bodenfreiheit um ein gewünschtes Gimbal zu montieren, Platzbedarf für Zusatzkomponenten wie Sensoren, Rettungsfallschirm, Abwurfvorrichtung, usw.
7. Musterberechnung einer Drohne anhand eines Beispiels aus der Praxis:
Um das ganze Thema greifbarer zu machen, gehen wir nun davon aus, dass wir eine Kundenanfrage vorliegen haben welche im Kundengespräch entsprechend auf diese Daten ergänzt wurde:
Musterdaten für unser Beispiel:
- Abmessungen: egal
- Maximales Abfluggewicht: <5kg
- Gewünschte Nutzlast in g: ca. 500g-700g
- Art der Nutzlast: Gopro Kamera mit Gimbal
- Gewünschte Features / Sonderoptionen: RTH, Rahmen aus Carbon, FC mit GPS, elektrisches Landegestell, FPV Übertragung und Gimbal steuerbar
- Nutzungshäufigkeit: Hobbypilot
- Ausfallsicherheit: wenn möglich Hexacopter gewünscht
- Gewünschte Flugzeit: mindestens 15 Minuten
- Aufrüstbarkeit: soll gegeben sein
- Budget: max. 1500 Euro für alles (inkl. Fernsteuerung und Zubehör)
Anhand dieser Informationen können wir nun alle weiteren Berechnungen vornehmen um die passenden Komponenten zusammenzustellen. Wir haben hier ein relativ gängiges Beispiel ausgesucht um möglichst viele Punkte abdecken zu können sodass die Überlegungen auch auf eigene Setups übertragen werden können.
7.1 Die ersten Überlegungen zum Setup:
Nun aber zum Aufbau der eigentlichen Drohne. Aus dem Anwendungszweck und natürlich in gewissem Maße auch aus dem Budget ergibt sich nun der erste Schritt in Richtung selbstgebauter Drohne.
Aus unserer Anwendungsdefinition wissen wir z.B. nun, dass der Transport grundsätzlich kein Problem wäre und wir vom Gewicht her aber auf jeden Fall unter 5kg bleiben müssen. Es soll eine Gimbal montiert werden und es ist ein elektrisches Landegestell gewünscht.
Wir wissen, dass bei allen Berechnungen auf jeden Fall noch mindestens die 700g gewünschte Nutzlast berücksichtigt werden müssen und wir für den eigentlichen Copter nun also maximal 4,3kg zur Verfügung haben.
Für die weiteren Schritte gibt es nun verschiedene Vorgehensweisen. Da wir natürlich auf die Erfahrung diverser vorheriger Setups zurückgreifen können haben wir schon einmal eine Idee was für diesen Kunden in Frage kommen würde und müssen bei den Berechnungen nicht bei Null beginnen.
Oftmals hat der Kunde auch eine gewisse Komponente wie z.B. einen Rahmen, Motoren, usw. im Auge und würde diese gerne verwenden. Diesem Wunsch kommen wir natürlich gerne nach, sofern sich darauf ein passendes Setup berechnen lässt.
Gehen wir aber nun einmal davon aus, dass alle Möglichkeiten offen sind und lediglich feststeht, dass ein Hexacopter-Rahmen gewünscht wird:
Aus unserer Schub-Faustformel wissen wir, dass für die max. 5kg 10kg Schub optimal wären um ein Verhältnis von 2:1 zu erreichen. Ob wir die Grenze voll ausnutzen müssen oder ob der Rahmen deutlich leichter wird ist an diesem Punkt noch nicht bekannt, wir haben lediglich einmal die Eckpunkte festgelegt.
Anhand der Eckdaten arbeiten wir uns nun durch die Komponenten um das optimale Setup zu berechnen.
Wir stehen allerdings erst einmal vor einem Problem:
Wir kennen zwar das Maximalgewicht und den dafür benötigen Schub, haben aber noch keine Vorstellung ob sich das ganze so überhaupt realisieren lässt bzw. ob es passende Komponenten gibt mit denen solch eine Drohne dann flugfähig wäre oder ob wir mit einem passenden Akku dann deutlich über der Gewichtsgrenze liegen würden.
Auch in die andere Richtung wissen wir nicht, ob sich vielleicht auch ein passendes Setup bereits mit 3kg realisieren lassen würde und wir gar nicht so viel Schub benötigen.
Natürlich ist auch klar, dass für 10kg Schub sehr wahrscheinlich andere Motoren als für 6kg Schub benötigt werden und das Gewicht der Motoren sich in diesem Fall auch unterscheidet und unser Gesamtgewicht entsprechen beeinflusst.
Wir haben also festgestellt, dass es verschiedene Abhängigkeiten zwischen den Komponenten gibt welche sich alle gegenseitig beeinflussen können, eine klassische Zirkelbeziehung.
Was also tun?
Unsere Empfehlung ist sich erst einmal bekannte Setups anzusehen um ein grobes Gefühl dafür zu bekommen, welche Komponenten für die gewünschte Anwendung verwendet werden und was diese ca. wiegen.
Auch das Stöbern in unseren Komplettsets ist hier sehr hilfreich. Evtl. findet sich ja bereits ein zusammengestelltes Setup welche unsere Anforderungen erfüllt und uns zusagt?
Sobald man sich einmal einige Rahmen und Motoren angesehen hat wird schnell klar, was ein Rahmen einer gewissen Größe ca. wiegt und wieviel Gramm Schub ein Motor mit 100g Eigengewicht erreichen kann, dies hilft uns die Komponenten besser einzugrenzen und erleichtert uns später die Suche.
Die Auswahl eines Setups für Multicopter ist kein linearer Prozess:
Wichtig ist auch anzumerken, dass die ganze Vorgehensweise kein linearer Prozess ist, sondern oftmals mehrere Durchgänge gebraucht werden um die optimalste Lösung zu finden, da sich ggfs. erst während der Überlegung zeigt, dass eine andere Komponente vielleicht besser passt, oder wichtige Punkte ansonsten nicht erfüllt werden könnten.
7.1.1 Überlegungen zur Nutzlast:
Wir gehen in unserer Überlegung einmal davon aus, dass eine GoPro Actioncam bereits vorhanden ist und nur noch ein passendes Gimbal benötigt wird.
Für unser Beispiel haben wir uns für ein GoPro Gimbal von Tarot entschieden.
 Tarot TL3T01 GoPro Gimbal
Tarot TL3T01 GoPro Gimbal
Mit Gimbal und GoPro (und etwas Reserve für Kabel usw.) liegen wir hier nun bei ca. 300g. Die restlichen 400g möchte der Kunde als Reserve einplanen um ggfs. Telemetriesensoren und Zusatzmodule zu nutzen oder doch einmal eine größere Kamera einsetzen zu können.
Für andere Nutzlasten wie z.B. Wärmebildkameras oder Abwurfmechaniken (z.B. Maiszünsler) gelten natürlich andere Ansatzpunkte. Wichtige Faktoren neben dem Gewicht sind vor allem aber die Montageposition und die benötigte Bodenfreiheit.
7.1.2 Die Wahl der Bauform und des Rahmens:
Der Rahmen ist das Grundkonstrukt und bestimmt maßgeblich auch das Gewicht der kompletten Drohne mit, zum einen durch das Eigengewicht, zum anderen aber auch durch die automatisch zu diesem Rahmen passenden Komponenten und deren Gewicht.
Um hier nochmals die Fahrzeug-Analogie aufzugreifen macht es einen Unterschied ob ich nach passenden Reifen und einem Motor für einen Smart suche oder ob die Komponenten an einem LKW montiert werden sollen.
Auf Sonderformen wie Tricopter oder Y6 werden wir in diesem Guide nicht weiter eingehen sondern uns eher auf die gebräuchlichsten Varianten konzentrieren.
Von Hersteller zu Hersteller weicht der Aufbau eines Multicopter-Rahmens natürlich immer etwas ab, folgende grundsätzliche Bauweise findet man aber bei den meisten Modellen:
Der Rahmen oder auch Frame genannt besteht in der Regel aus zwei Zentralplatten (Centerplates) welche die Ober- und Unterseite des Rahmens bilden. Zwischen den Centerplates werden dann mit Montageblöcken die Arme montiert. Bei Modellen mit klappbaren Armen gibt es dann noch Halteblöcke oder Gelenke welche die Arme in der jeweiligen Position arretieren. Manche Rahmen haben direkt in den Centerplates eine Verteilerplatine integriert, es handelt sich also im Grunde um eine große Platine welche Lötpunkte für die Verteilung der Spannung bereitstellt. Bei anderen Rahmen wird ansonsten eine Verteilerplatine eingesetzt.
Modelle von Tarot bieten an der Unterseite zwei Schienen welche als Montageschiene für den Einsatz eines Gimbals oder die Montage eines Akkus genutzt werden können. Bei anderen Herstellern wird das Gimbal ansonsten direkt auch an die Untere Centerplate geschraubt.
Den Abschluss nach unten bildet ein Landegestell. Bei den meisten Modellen wird auf zwei Arme mit Kufen (T-Stücken) an der Unterseite gesetzt, da es sich mit dieser Lösung leichter landen lässt als z.B. mit drei oder vier einzelnen Beinen.
Da die Vorgaben für unser Musterbeispiel Hexacopter, Carbon und elektrisches Landegestell waren haben wir hier auf jeden Fall schon einmal einen guten Startpunkt.
An dieser Stelle macht es nun einmal Sinn den Markt zu sichten was für Rahmen überhaupt erhältlich sind welche diese Anforderungen erfüllen. Viele Rahmenhersteller haben auch oftmals schon wertvolle Daten veröffentlicht wie z.B. das reine Rahmengewicht die maximal montierbare Propellergröße, Durchmesser von Motor zu Motor, Bodenfreiheit bei ausgefahrenem Landegestell, sowie manchmal sogar Empfehlungen für ein Setup oder Angaben zur maximalen Nutzlast.
Um bei unserem Beispiel zu bleiben haben wir uns nun verschiedene Rahmen angesehen und folgende Hexacopter-Rahmen gefunden:
 Tarot TL6X001 Hexacopter
Tarot TL6X001 Hexacopter
Hier wird schnell klar, dass es sich um ein relativ großes Modell handelt. Der reine Rahmendurchmesser beträgt bereits knapp einen Meter und das Gewicht liegt bei 2,3kg. Auch die maximale Propellergröße von 18 Zoll (ca. 45cm) machen die späteren Ausmaße deutlich. Zusammen mit unserer geplanten Nutzlast liegen wir nun bereits ohne weitere Komponenten bei einem Gewicht von 3kg. Der Erfahrene Drohnenbauer wird an dieser Stelle wahrscheinlich bereits erkennen, dass dieser Rahmen für den gewünschten Anwendungszweck eine Nummer zu groß ist. Der Beginner hat nach einer Google-Recherche einige Videos und Bauberichte mit diesem Rahmen gefunden welcher bis zu 3kg Nutzlast transportiert und bei einem Abfluggewicht von rund 10kg lag.
Ob wir die 5kg Grenze nicht doch halten können ist bisher noch nicht klar, aber wie im Punkt Überdimensionierung beschrieben macht es auf alle Fälle Sinn zu prüfen ob es nicht auch noch eine Effizientere Lösung gibt.
Suchen wir also weiter.
Das Design des Rahmens von Tarot hat uns gut gefallen, wir haben bei weiterer Suche nun ein kleines Modell mit knapp 70cm Rahmendurchmesser und 780g Rahmengewicht gefunden:
 Tarot 680 Pro Hexacopter
Tarot 680 Pro Hexacopter
Das elektrische Landegestell ist beim Rahmen selbst nicht enthalten, dieses haben wir aber unter den Zubehörartikeln als Nachrüstsatz entdeckt:
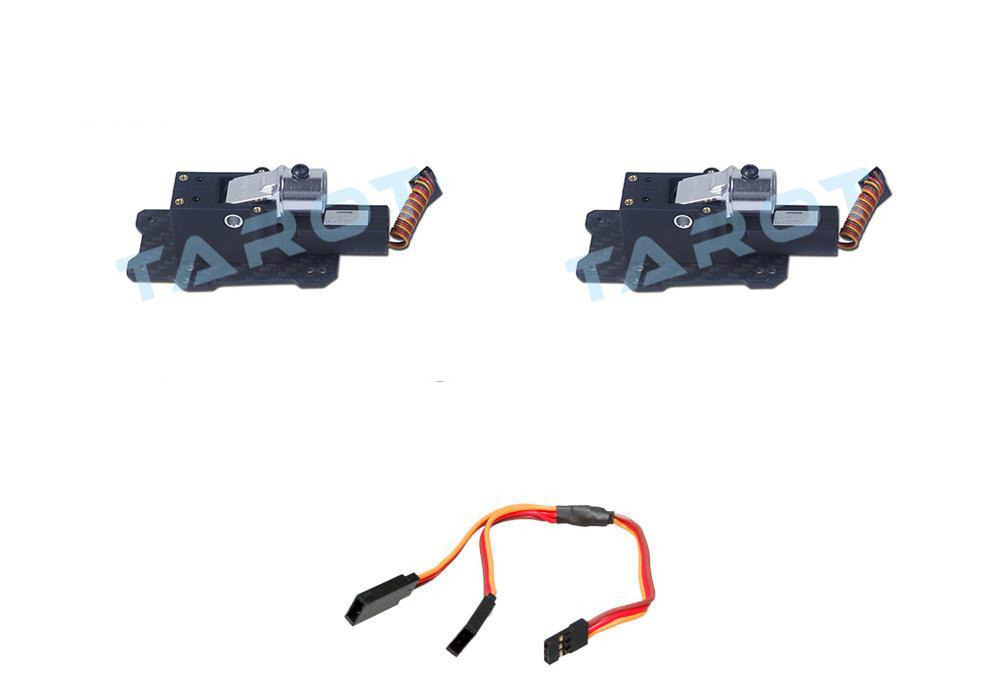 Tarot TL65B43 - Elektrisches Landegestell Umbau-Set
Tarot TL65B43 - Elektrisches Landegestell Umbau-Set
Die Umbauteile schlagen nochmals mit 90g zu Buche womit wir bei einem reinen Rahmengewicht von ca. 870g liegen. Bei der weiteren Suche haben wir herausgefunden, dass an diesem Rahmen gerne GoPro Gimbals montiert werden, das ganze sieht also schon einmal gut aus und der Rahmen scheint auf jeden Fall stabil genug für unser Vorhaben.
Fassen wir an dieser Stelle kurz zusammen:
Hexacopter-Bauform ✔
Rahmen aus Carbon ✔
Elektrisches Landegestell ✔
Auslegung des Rahmens für die gewünschte Nutzlast ✔
Bodenfreiheit zur Montage des Gimbals ✔
7.1.3 Die Wahl des passenden Antriebes für unsere Drohne:
7.1.3.1 – A: Vorüberlegungen und technischer Hintergrund:
Kommen wir nun also zu den nächsten wichtigen Punkten: Wie lege Ich den restlichen Antrieb passend zum Rahmen und der gewünschten Nutzlast bzw. meinem daraus resultierenden Gesamtgewicht aus?
Welche Variablen können wir bei der Auswahl eines Antriebes beeinflussen?
Bevor wir in die Auswahl der Antriebskomponenten einsteigen ist noch ein kleiner Exkurs notwendig.
Auch bei der Wahl des Antriebes gibt es wieder Variablen welche gegenseitigen Abhängigkeiten unterliegen.
Von uns beeinflussbare Größen sind:
Spannung des genutzten Akkus (gemessen in Volt)
Propellerdurchmesser (gemessen in Zoll)
Motordrehzahl (Drehzahl ohne Last, gemessen in kv)
Gewicht der verwendeten Komponenten (gemessen in g)
Daraus ergeben sich für uns folgende Beurteilungsgrößen anhand derer wir die jeweilige Zusammenstellung bewerten können:
Maximal Schub und Schub im Schwebeflug (gemessen in g oder kg) => Messgröße zur Prüfung ob unser Setup einsatzfähig ist
Effizienz des Antriebes (gemessen in Schub (g)/ Watt) => Messgröße zur Prüfung ob unser Setup effizient arbeitet.
Ein großer Vorteil ist jedoch, dass uns die Hersteller schon einen großen Teil der Arbeit abgenommen haben und Messdaten zu den Motoren veröffentlichen.
Wichtig ist hier für uns als erstes einmal die Beurteilung des maximalen Schubs, um sicherzustellen, dass der Motor überhaupt für unser Vorhaben passend ist. Erst im nächsten Schritt werden wir uns dann Gedanken über die Effizienz und die Optimierung der Flugzeit machen (es wäre für uns z.B. nicht hilfreich zu wissen, dass ein Motor zwar eine sehr gute Effizienz erreicht, aber leider nicht einmal 50% unseres benötigten Schubs überhaupt liefern kann).
Anhand von Beispielsetups haben wir gesehen, dass für unseren Tarot Rahmen das Abfluggewicht in der Regel immer zwischen 3-3,5kg lag. Planen wir noch etwas Reserve ein und gehen von 4kg aus. Bei einem Schub-Gewichts-Verhältnis würden wir somit bei 8kg benötigtem Schub liegen (hätten wir gar keinen Anhaltspunkt könnten wir auch mit dem Maximum, also 5kg Gewicht, bzw. 10kg Schub planen). Um mit 6 Motoren 8kg Schub zu erreichen teilen wir nun einfach den Gesamtschub durch die Anzahl der Motoren um den maximalen Schub pro Motor zu erhalten:
8000g / 6 Motoren = 1333,33 g benötigter Maximal Schub pro Motor
Wie kann der benötigte Schub pro Motor berechnet werden?
Benötigter Gesamtschub / Anzahl der Motoren = Einzelschub pro Motor
Oder umgestellt um für einen gewünschten Motor den Gesamtschub zu berechnen:
Anzahl der Motoren * Einzelschub = Gesamtschub
Um die Auswahl der Motoren einzugrenzen sortieren wir nun Anhand der Schubwerte schon einmal grob Motoren aus welche auf keinen Fall in Frage kommen bzw. bereits deutlich zu groß sind.
Das Gewicht der Motoren und Propeller steht meist im direkten Zusammenhang mit deren Leistungswerten. Wir werden also z.B. keinen Motor finden, der bei gleichem Gewicht (und gleichen oder besseren Effizienzwerten) den doppelten Schub erzeugen kann, daher können wir die Gewichtsvariable nur indirekt beeinflussen. Wichtig ist auch hier anzumerken, dass die 2:1 lediglich einen Erfahrungswert darstellen und nicht in Stein gemeißelt sind. Auch ein Setup mit 1,85 oder 1,9 ist ohne Probleme fliegbar. daraus lässt sich ableiten dass ein Motor mit z.B. 1300g Schub nicht direkt aussortiert werden muss, vor allem da wir das exakte Abfluggewicht noch nicht kennen.
Anhand der Messdaten eines jeden Motors erhalten wir einen Überblick welche (sinnvolle) Kombinationen aus Motoren, Propeller und Spannung es gibt um eine gewünschtes Maß an Schub zu erreichen.
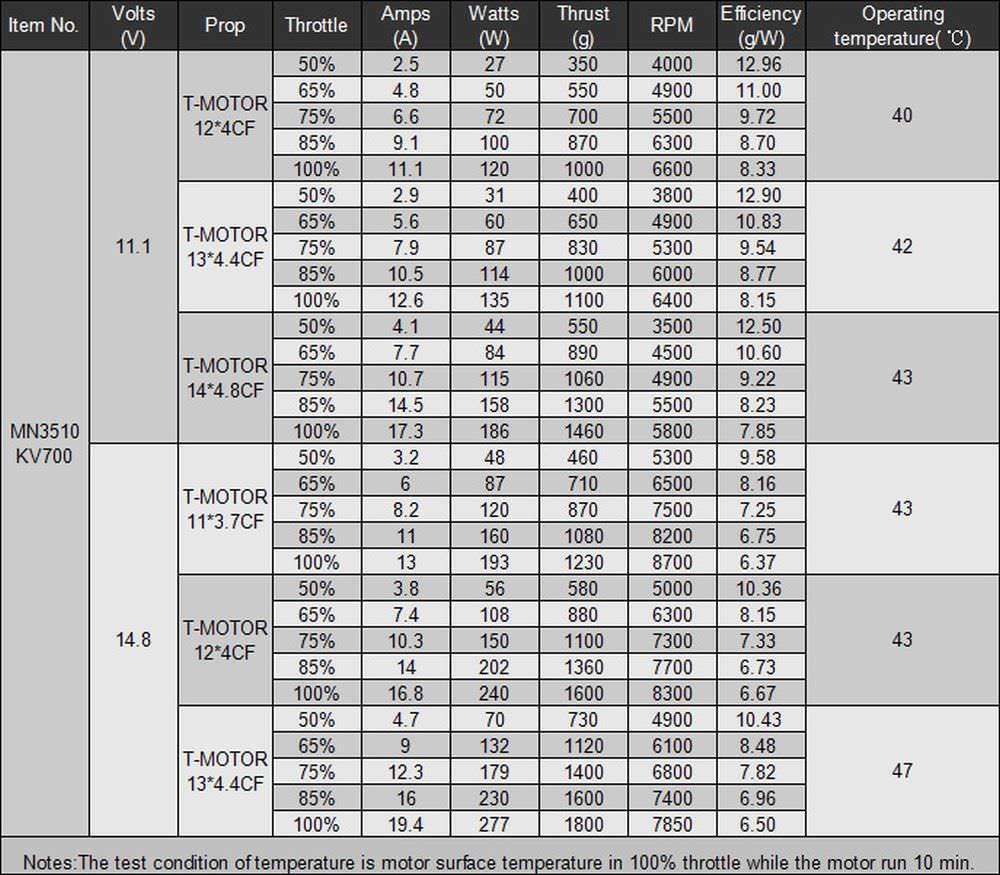 Beispiel Messdaten eines T-Motor MN3510 mit 700kv
Beispiel Messdaten eines T-Motor MN3510 mit 700kv
Hier nun ein Beispiel für die Messdaten eines T-Motor MN3510 700kv Motors anhand derer wir alle nötigen Werte ausführlich erläutern werden:
Links steht der Modelltyp und die KV-Zahl, dann die verschiedenen gemessenen Spannungen (11,1V und 14,8V) und die jeweils vermessenen Propellergrößen mit den Leistungsangaben und der Temperatur bei verschiedenen Messpunkten.
Im Grunde handelt es sich also um zwei Tabellen untereinander eine für 11,1V und eine für 14,8V.
Bevor wir in die Auswahl einsteigen noch eine kurze Anmerkung zu den Berechnungen:
Zusammenhang von Volt, Ampere und Watt:
Oftmals erhalten wir Anfragen wie:
Ich Suche einen Motor mit xxx Watt, habt Ihr sowas?
Wie viele vielleicht noch aus dem Physikunterricht wissen, berechnet sich die elektrische Leistung aus dem Produkt von Spannung und Strom (P = U * I)
Nehmen wir einmal aus der Tabelle oben folgende Zeile:
14,8V T-Motor 13x4.4CF 50% 4.7A 70 Watt 730g 4300 RPM
Wir suchen Watt(P) = 14,8V * 4,7A
Mit den eingesetzten Werten erhalten wir 69,56 Watt was gerundet den von T-Motor angegeben 70 Watt entspricht.
Die Leistung (Watt) ist als immer ein Produkt aus Spannung und Ampere und keine konstante Ausgangsgröße. Ein Motor hat also bei einer gewissen Belastung (hier im Beispiel 50% Schub mit einem 13 Zoll Propeller) eine Leistung von 70 Watt, bei Verwendung eines anderen Propellers, anderem % Schub, usw. ist die Leistung wieder eine völlig andere.
Bei der Durchsicht der Motoren in unserem Shop fällt auf, dass es von manchen Modellen, welche auf den ersten Blick vom Gewicht und den Abmessungen her gleich sind mehrere Versionen gibt, welche sich lediglich in der KV-Zahl unterscheiden (vom im Beispiel genannten MN3510 gibt es z.B. eine 700kv, 630kv sowie 360kv Version).
Was bedeutet KV bei Brushless Motoren?
Antwort: KV steht für Umdrehungen pro Minute pro Volt (U/min/V)Beispielsweise dreht ein Motor mit 700 KV 700 Umdrehungen pro Minute pro Volt. Es handelt sich immer um die Leerlaufdrehzahl ohne Last.
Bei einem Betrieb an 4S Lipo (16V) würde solch ein Motor also über eine Leerlaufdrehzahl von 16 x 700 = 11200 U/min verfügen.
Die KV-Zahl gibt also an mit welcher Drehzahl der Motor pro Volt (und ohne Last) laufen würde. Um das Ganze zu verdeutlichen kann man sich ein einfaches Beispiel ansehen: Gehen wir davon aus, dass es vom oben genannten Motor noch ein Modell gibt, welches nun nicht über 700kv sondern über 350 KV verfügt.
Beim Betrieb an 16V hätten wir nun folgende Drehzahl: 16 x 350 = 5600 U/min. Um die gleiche Drehzahl von 11200 U/min zu erreichen müssten wir diesen Motor mit 32V betreiben (32 x 350 = 11200 U /min).
7.1.3.2 Userfrage: Was bedeutet z.B. 13x5.5 bei einem Propeller?
Propeller werden immer als Durchmesser x Steigung angegeben. Beide Werte sind in Zoll. Es handelt sich also um einen Propeller mit einem Durchmesser von 13 Zoll und einer Steigung von 5.5 Zoll. Der Durchmesser erscheint jedem einleuchtend was genau ist aber die Steigung? Die Steigung entspricht einer Strecke welche ein Propeller in einer Umdrehung in einem festen Material zurücklegen würde. Eine höhere Steigung sorgt also für eine höhere Geschwindigkeit, allerdings ist dafür auch mehr Drehmoment (Leistung) erforderlich.
7.1.3.3 Userfrage: Was bedeutet CW und CCW bei Propellern?
Bei Multicoptern werden Propeller immer als CW und CCW Variante eingesetzt, d.h. es gibt Propeller welche linksherum und rechtsherum drehen. Dies hat das Ziel das Drehmoment der Motoren auszugleichen ( da ja z.B. im Gegensatz zu einem Hubschrauber kein Heckrotor vorhanden ist). Ein Quadcopter verwendet zwei CW und zwei CCW Propeller, ein Hexacopter drei CW und drei CCW Propeller, usw.
Wer genaueres dazu wissen möchte findet weitere Angaben hierzu unter folgendem Beitrag in unserem Lexikon: Wahl der richtigen Propeller in Glossar (Link wird noch ergänzt)
Wir haben nun festgestellt, dass es zwischen der Spannung (von uns beeinflussbare Variable) und der Motordrehzahl (von uns beeinflussbare Variable) einen Zusammenhang gibt und dass es mehrere Möglichkeiten gibt um eine bestimmte Drehzahl zu erreichen. Wie hängt nun die Propellergröße (letzte von uns beeinflussbare Variable) mit den anderen zusammen?
Wer sich für einen Motor einmal die Messdaten ansieht wird feststellen, dass mit einem größeren Propeller der Schub sowie (leider auch) die Wattzahl entsprechend zunimmt, das ist auch einleuchtend, wie sieht es aber mit einer zunehmenden KV-Zahl aus?
| Motor | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Ampere (A) | Watt (W) | Schub (g) | U/M | Effizienz (g/W) | Temperatur (*C) |
| MN3510 | 360 | 14,8V | 14x4.8CF | 50% | 1,2 | 17 | 280 | 2600 | 16,47 | 40 |
| 65% | 2,5 | 38 | 500 | 3400 | 13,16 | |||||
| 75% | 3,5 | 51 | 620 | 3800 | 12,16 | |||||
| 85% | 4,9 | 70 | 760 | 4300 | 10,86 | |||||
| 100% | 5,7 | 83 | 870 | 4600 | 10,48 | |||||
| MN3510 | 630 | 14,8V | 14x4.8CF | 50% | 4,6 | 68 | 700 | 4100 | 10,29 | 53 |
| 65% | 8,7 | 128 | 1110 | 5300 | 8,67 | |||||
| 75% | 11,8 | 177 | 1360 | 5700 | 7,68 | |||||
| 85% | 16,4 | 237 | 1700 | 6300 | 7,17 | |||||
| 100% | 20 | 288 | 1850 | 6600 | 6,42 | |||||
| MN3510 | 700 | 14,8V | 14x4.8CF | - | - | - | - | - | - | - |
Wir haben im Schaubild oben einmal die Messdaten der drei MN3510 Motoren bei 14x4.8CF gegenübergestellt. Was als erstes auffällt ist, dass offenbar für den 700kv Motor gar keine Messdaten an 14x4.8CF vorliegen. Wieso das so ist klären wir später.
Konzentrieren wir uns nun auf den Vergleich der 360kv und 630kv Variante. Es wird schnell deutlich, dass bei gleichem % Schub sowohl die Drehzahl als auch die Leistung und Schubwerte sich deutlich unterscheiden. Es wird deutlich, dass bei höherer KV-Zahl die Drehzahl und die Schubwerte zunehmen. Das erscheint logisch, der 630kv Motor dreht bei gleicher Spannung deutlich schneller und erzeugt somit mehr Schub und auch mehr Drehzahl.
Was wir allerdings auch erkennen, ist, dass die Leistung ebenfalls mit ansteigt. Wenn wir uns die Werte bei 50% einmal ansehen erkennen wir, dass der Motor mit 630kv 700g Schub bei 68 Watt Leistung erreicht. Der Motor mit 360kv erreicht lediglich 280g ist aber mit nur 17 Watt auch deutlich effizienter! Nicht verwunderlich ist auch, dass die Temperatur der 630kv Variante höher ist. Bei Vollgas leistet der Motor bereits 288 Watt, die 360kv Variante lediglich 83 Watt. Hier haben wir nun auch die Erklärung gefunden weshalb die 700kv Variante gar nicht an 14x4.8CF vermessen wurde. Der Motor würde mit hoher Wahrscheinlichkeit überlastet werden und zu warm.
Klar wird aber auch, dass der 630kv Motor mehr als doppelt so viel Schub als der 360kv Motor liefert und ein möglicher Kandidat für unser Projekt wäre, wohingegen der 360kv Motor von den Werten deutlich zu schwach ausfällt. Wir stellen aber fest, dass für die 360kv Variante zusätzlich auch noch Messdaten für 6S Lipos (22,2V) zur Verfügung stehen. Wenn wir nun den 360kv Motor an 6S mit dem 630kv an 4S vergleichen erkennen wir wieder genau den vorher beschriebenen Zusammenhang zwischen KV-Zahl, Betriebsspannung und Propellergröße:
| Motor | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Ampere (A) | Watt (W) | Schub (g) | U/M | Effizienz (g/W) | Temperatur (*C) |
| MN3510 | 360 | 22,2V | 14x4.8CF | 50% | 2,5 | 57 | 660 | 4000 | 11,58 | 50 |
| 65% | 4,7 | 105 | 1000 | 4900 | 9,52 | |||||
| 75% | 6,8 | 150 | 1280 | 5500 | 8,53 | |||||
| 85% | 8,8 | 194 | 1500 | 6000 | 7,68 | |||||
| 100% | 10 | 234 | 1700 | 6500 | 7,26 | |||||
| MN3510 | 630 | 14,8V | 14x4.8CF | 50% | 4,6 | 68 | 700 | 4100 | 10,29 | 53 |
| 65% | 8,7 | 128 | 1110 | 5300 | 8,67 | |||||
| 75% | 11,8 | 177 | 1360 | 5700 | 7,68 | |||||
| 85% | 16,4 | 237 | 1700 | 6300 | 7,17 | |||||
| 100% | 20 | 288 | 1850 | 6600 | 6,42 | |||||
| MN3510 | 700 | 14,8V | 14x4.8CF | - | - | - | - | - | - | - |
Ein Motortyp wird abhängig vom Einsatzwerk, daher oftmals mit verschiedenen KV-Zahlen hergestellt. Der 630kv ist somit ein Motor welcher für den Betrieb an 4S Lipo vorgesehen ist, der 360kv hingegen für den Betrieb an 6S. Natürlich könnte der 630kv Motor ebenfalls an 6S eingesetzt werden, man müsste hierzu dann allerdings den Propeller auf eine solche Größe verringern dass die Schubwerte wahrscheinlich nicht mehr interessant sind.
Was wir außerdem feststellen wenn wir über verschiedene Propellergrößen die Schubwerte vergleichen, ist, dass die Effizienz bei größeren Propellern zunimmt. D.h. für 1000g Schub bei einem 12 Zoll Propeller mehr Watt notwendig sind als bei einem 13 oder 14 Zoll Propeller. Machen größere Propeller also automatisch immer Sinn? Leider kann man hier keine pauschale Aussage treffen. Mit größeren Propellern gehen auch einige Nachteile wie z.B. eine höhere Trägheit und Windanfälligkeit einher. Bei einer Videodrohne wird der Zuwachs an Trägheit aber in der Regel gerne durch die höhere Effizienz in Kauf genommen, bei einem kleinen FPV Racer sieht das Ganze schon wieder anders aus, hier wird eher Fokus auf schnelle Reaktionsraten gesetzt.
Ebenfalls schön lassen sich der Zusammenhang zwischen Ampere, Volt und Watt erkennen (wie wir vorher aus dem Zusammenhang P = U * I abgeleitet haben). Der MN3510 360kv benötigt bei 22,2V nur 10A leistet aber bereits 234Watt. Der MN3510 mit 630kv benötigt bei 14,8V hingegen mit 20A die doppelte Ampere-Anzahl für 288 Watt. Welche Vor und Nachteile dies hat klären wir vor allem bei der Auslegung der passenden Regler.
7.1.3.4 Userfrage: Wieso gibt es keine Daten für z.B. 5S sondern wird direkt von 4S auf 6S gesprungen?
Das ist eine gute Frage. Es hat sich bei den Herstellern oftmals so eingebürgert, dass Motoren gängiger Weise entweder für 3S, 4S oder 6S Setups optimiert sind. Auch Akkuhersteller produzieren die meisten, passenden Akkus in dieser Ausfertigung. Wer aber passende Komponenten findet kann aber natürlich auch mit 5S planen, auf Grund der fehlenden Messdaten wird dies aber meist schwieriger.
7.1.3.5 Wahl der richtigen Spannung für die Drohne:
Häufige Frage: Wieso empfehlt ihr einen 6S Lipo ein 4S Lipo ist doch viel leichter?
Solche oder ähnliche Anfragen erhalten wir ebenfalls häufig. Viele Kunden schrecken z.B. 6S Lipos nach wie vor ab da Sie befürchten, dass diese schwerer sind.
Grundsätzlich haben die Kunden natürlich in erster Linie rech: ein 6S 5000mAh Lipo ist natürlich deutlich schwerer als ein 4S 5000mAh Lipo.
Die Lösung ist allerdings nun, dass die reine mAh-Angabe nicht alleine als Vergleichsgrundlage genommen werden kann. Entscheidend sind immer die Wattstunden (also die Angabe der Größe welche Energie der Akku abgeben kann). Hierzu muss man sich den Aufbau eines Lipo-Akkus genauer ansehen.
Ein 4S 5000mAh Lipo besteht aus 4 einzelnen Zellen welche jeweils 3,7V (Nenn)Spannung und 5Ah (5000mAh) Kapazität verfügen. Ein 6S 5000mAh Akku folglich aus 6 einzelnen Zellen.
Schauen wir uns nun die Formel für die Berechnung der Wattstunden (Wh) an:
Wh = Ah * Volt
In unserem Beispiel für einen 4S 5000mAh Lipo:
Wh = 5Ah * (4 * 3,7V)
Wh=74
Für den 6S Lipo:
Wh = 5Ah *(6* 3,7V)
Wh=111
Nun wird deutlich, dass dem größeren Gewicht auch eine deutlich höhere Anzahl an Wattstunden entspricht (wir haben unser Beispiel bewusst so gewählt, dass es sich um einen Faktor von 1.5 handelt)
Umgekehrt können wir nun ausrechnen, welche Kapazität der 6S Lipo Akku haben müsste um die gleichen Wattstunden zu liefern, also tatsächlich vergleichbar mit dem 4S Akku zu sein:
Wir stellen die Formel hierzu um, um die Kapazität zu erhalten und setzen für die Wattstunden die bekannten 74Wh des 4S Lipos ein.
Ah = Wh / Volt
Ah = 74Wh / (6*3,7V)
Ah =3333,33
Wir haben also festgestellt, dass von den Wattstunden her bereits ein 3333mAh 6S Lipo einem 4S 5000mAh entspricht. Im Umkehrschluss können wir also einen von der Kapazitätsangabe kleineren 6S Lipo einsetzen um die gleichen Werte wie mit einem 4S Lipo zu erreichen.
Wen wir nun das Gewicht eines 4S 5000mAh Lipos mit dem eines 6S 3333mAhs vergleichen werden wir feststellen, dass diese nahezu identisch sind (kleine Unterschiede ergeben sich durch die Verpackung der Zellen, Kabel, usw. .). Auch vom Laden her macht es keinerlei Unterschied über welche Spannung der Akku verfügt sofern die Wattstunden identisch sind (vorausgesetzt das Ladegerät unterstützt die jeweilige Laderate).
Weitere Hinweise zur Nutzung von Lipo-Akkus gibt es auch im Lipo-Beitrag in unserem Lexikon
Wer bis hierher durchgehalten hat wird feststellen, dass das Ganze doch ein komplexes Thema sein kann. Als Anwender kann man sich aber auch an ein Paar einfachen Grundregeln orientieren welche schon zu einem sehr guten Ergebnis führen und helfen typische Fehler zu vermeiden:
Zusammenfassung unserer bisherigen Ergebnisse:
Für unsere weiteren Überlegungen können wir folgende (vereinfachte) Zusammenhänge festhalten:
- Je größer der Propeller im Durchmesser, je höher ist der erzeugte Schub
- Je höher die Steigung desto höher die Geschwindigkeit, aber auch die benötigte Leistung
- Je höher die KV-Zahl desto höher die Wattzahl und der Schub (bei gleichem Motormodell und gleichem Propeller)
- Größere Propeller sind effizienter als kleinere Propeller (betrachtet für den selben Schub)
- Die KV-Zahl und die Spannung haben einen Einfluss auf die maximale Propellergröße
- Bei doppelter Spannung halbieren sich die Ampere (für die gleiche Wattzahl)
- Motoren mit niedrigerer KV-Zahl sind oftmals eher für höhere Spannungen ausgelegt und umgekehrt
- Gängige Betriebsspannungen für Drohnen sind 3S, 4S, 6S Lipo
7.1.3.7 Auswahl von Motoren und Propellern:
In den technischen Daten unseres Rahmens haben wir auch eine Angabe zur maximalen Propellergröße gefunden. In diesem Fall 13 Zoll. Hierbei handelt es sich immer um eine Angabe bei welcher bereits ein entsprechender Abstand zwischen den Propellern sowie Propellern und evtl. Aufbauten wie Hauben oder Akkuhalterungen berücksichtigt wurde. Die 13 Zoll können also voll ausgenutzt werden und es muss nicht noch ein extra Abstand eingehalten werden.
(Sollten wir also wider Erwarten gar keine Kombination mit maximal 13 Zoll Propellern finden welche passt, müssten wir an dieser Stelle wieder einen Schritt zurückgehen und unsere Rahmenwahl nochmals überdenken. Auch wird wieder deutlich dass die Auswahl nicht immer in einem linearen Prozess abläuft).
Zur gewünschten Spannung haben wir keine Vorgaben vorliegen. Oft kommt es vor, dass Kunden bereits eine Drohne besitzen und die dort verwendeten Akkus möglichst weiter verwenden möchten, daher rührt dann die vorherige Festlegung auf eine Betriebsspannung. Flexibler (und meistens beim Setup auch effizienter) ist man natürlich wenn man alle Möglichkeiten durchprüft.
Die Vorgabe war also:
-Maximal 13 Zoll Propeller
-Maximalschub pro Motor sollte bei mindestens ca. 1330g liegen
-Betriebsspannung ist noch offen (keine Vorgaben)
Da wir wissen, dass größere Propeller meistens effizienter sind und bei dieser Rahmengröße 13 Zoll auch nicht zu groß sind (und wir uns somit wegen zu hoher Trägheit und Windanfälligkeit keine Gedanken machen müssen) fangen wir direkt damit an zu prüfen ob es passende Motoren für 13 Zoll Propeller gibt, da wir somit diesen Optimierungspunkt direkt mit abhaken können.
| Motor | Gewicht (g) | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Ampere (A) | Watt (W) | Schub (g) | Effizienz (g/W) | Temperatur (*C) |
| T-Motor MN3510 | 97 | 700 | 14,8V | 13x4.4CF | 50% | 4,7 | 70 | 730 | 10,43 | 50 |
| 100% | 19,4 | 277 | 1800 | 6,5 | ||||||
| T-Motor MN3508 | 82 | 700 | 14,8V | 12x4.4CF | 50% | 3,8 | 55 | 460 | 8,36 | 48 |
| 100% | 16,1 | 234 | 1360 | 5,81 | ||||||
| T-Motor MN3510 | 97 | 360 | 22,2V | 13x4.4CF | 50% | 1,8 | 40 | 460 | 11,5 | 43 |
| 100% | 7,5 | 166 | 1300 | 7,83 | ||||||
| T-Motor MN3508 | 82 | 380 | 22,2V | 13x4.4CF | 50% | 2,1 | 46 | 550 | 11,96 | 50 |
| 100% | 8,4 | 185 | 1380 | 7,46 |
Fangen wir also mit der Suche an. Wir haben nun ein Paar Motoren exemplarisch in einer Tabelle zusammengefasst:
Es handelt sich hierbei natürlich nur um einen Auszug, es gibt noch deutlich mehr Motoren welche geeignet wären. Beim MN3508 700kv gibt es eine Besonderheit. Hier sind seitens T-Motor nämlich keine Schubdaten für 13 Zoll enthalten sondern lediglich für 12 Zoll Propeller. Die Temperatur nach 10 Minuten Vollgas liegt allerdings noch weit unter einer problematischen Grenze (hier geben die Hersteller unterschiedliche Empfehlungen ab, bei T-Motor wären aber auch 60-70+ Grad im Dauerbetreib kein Problem) sodass wir davon ausgehen können, dass auch 13 Zoll Propeller ggfs. möglich sind. Der MN3510 mit 360kv liegt leicht unter unserer Grenze, aber auch hier hätten wir ggfs. noch die Möglichkeit Propeller mit höherer Steigung einzusetzen. Wir übernehmen diese vier Motoren in unsere Auswahl. Im Teil Optimierung der Flugzeit schauen wir uns die Motoren dann genauer an, dort wird dann auch das Motorengewicht eine Rolle spielen was wir bisher noch vernachlässigt haben.
Userfrage: Bei meinen ausgesuchten Motoren sind in den Schubdaten für die gewünschten Propeller nicht enthalten, kann Ich diese trotzdem verwenden?
Die Antwort hierauf ist ein klares vielleicht :)
Natürlich können Hersteller nicht alle erdenklichen Propellerkombinationen testen, daher werden die Messdaten oftmals auf die gängigsten und für diesen Motor passendsten Modelle reduziert.
Für einen Motor der z.B. für 15 Zoll Propeller an 6S ausgelegt ist macht es wenig Sinn auch die Ergebnisse mit 10 Zoll Propellern zu veröffentlichen, da niemand den Motor so einsetzen würde.
Auch gibt es immer wieder Neuentwicklungen sodass z.B. ein Propellertyp zum Zeitpunkt des Motorentests noch gar nicht verfügbar war. Als letzter Punkt ist es natürlich auch so, dass Motorenhersteller auch oftmals Propeller im Sortiment haben und die Testdaten dann entsprechend auf die eigenen Modelle fokussieren.
Nun aber zur eigentlichen Frage, ob auch Propeller genutzt werden können welche nicht in der Tabelle zu finden sind. Unsere Empfehlung ist sich hierbei an möglichst ähnlichen Modellen zu orientieren. Sind z.B. Testdaten für 13x4.5 verfügbar und der Motor ist noch weit von den Grenzwerten entfernt werden 13x5.5 kein Problem sein, vorausgesetzt die Betriebsspannung bleibt gleich. Wird der Motor hingegen an 12x4.5 schon extrem heiß, macht es wenig Sinn 14 oder 15 Zoll Propeller zu probieren.
Wichtig ist vor allem auch immer die angegebene Spannung zu beachten bei welcher die Messung durchgeführt wurde. Ein Sprung von 4S auf 5S oder gar 6S ist enorm und hier sollte man auf jeden Fall vorab klären ob der Motor auch geeignet ist.
Userfrage: Können Schubwerte verschiedener Motoren / Hersteller direkt verglichen werden und kann Ich die Schubwerte 1:1 für meine Drohne übertragen?
Wichtig ist hier vor allem auf folgende Punkte zu achten: Art der Spannungsquelle und die angegebene Spannungsquelle mit der die Messungen durchgeführt werden.
Hersteller wie T-Motor verwenden für die Messungen oftmals ein Netzteil sodass eine konstante Spannung von z.B. 24V genutzt werden kann. Das Netzteil ist so dimensioniert, dass die Spannung auch unter Volllast nicht einbricht. Der Vorteil ist, dass die Messergebnisse so unverfälschter und der Motor nicht limitiert ist. Im Gegensatz dazu könnte z.B. ein zu schwach dimensionierter Akku dazu führen, dass die Spannung während des Messvorgangs einbricht und die Werte entsprechend geringer ausfallen.
In der Praxis und im Flug werden allerdings ebenfalls Akkus eingesetzt, daher ist klar dass die Werte immer etwas abweichen werden. Wenn wir beim Beispiel 24V Netzteil im Vergleich zu Lipo bleiben hat ein vollgeladener 6S Akku 25,2V( 6 x 4,2 Volt). Unter Last und im Betrieb wird aber selbst der beste Akku immer etwas einbrechen und natürlich wird die Spannung während des Fluges immer geringer bis die eingestellte Abschaltspannung erreicht wird. Wenn wir von einer Entladung auf 3,3 V pro Zelle ausgehen wären dann kurz vor dem Abschalten lediglich noch 19,8V zur Verfügung. Das sind rund 20% weniger. Natürlich lässt sich dies nicht verhindern und ist der Natur der LiPo Akkus geschuldet, man sollte die Tatsache aber zumindest mit in die Überlegung zumindest mit einbeziehen und kein zu knapp kalkuliertes Setup einsetzen da dann ansonsten die Regelfähigkeit beeinträchtigt ist.
7.1.4 Die Wahl der Brushless Regler (ESCs):
Ein Brushless Regler (ESC steht für Electronic Speed Controller) hat die Aufgabe das Signal des Flightcontrollers (0% = Motor aus, 100% = Vollgas) zu verarbeiten und den angeschlossenen Motor entsprechend anzusteuern. Bei Brushless Motoren ist zwingend ein passender Regler notwendig, ein direkter Anschluss an eine Gleichstrom-Spannungsquelle (z.B. auch für einen Testlauf) ist nicht möglich.
Bei den Reglern ist die Auswahl nun schon etwas einfacher. Die Regler Dimensionierung wird maßgeblich durch die Motoren und die verwendete Betriebsspannung vorgeben. Für die ersten Planungen genügt es also abzuklären ob es passende Regler gibt (dies wäre vor allem bei einem HV High Voltage Betrieb über 6S ein Thema) und mit welchem Gewicht wir hier ca. rechnen müssen.
Hier kommen wir nun auch nochmals zum Punkt der Wattzahl. Nicht alle Hersteller geben maximale Watt Werte an sondern oftmals lediglich eine konstante und kurzzeitige Ampere-Belastbarkeit. Es sollte klar sein, dass z.B. 30A konstant bei 7,2V (2S Lipo) lediglich 216 Watt entsprechen, bei 6S hingegen bereits über 660 Watt. Es ist also durchaus sinnvoll auch im Bezug auf die Einbauposition sich klarzumachen welche Menge an Wärme ggfs. abgeführt werden muss.
Grundsätzlich wird pro Motor auch ein Regler benötigt. Die klassische Variante sind hierbei dann einzelne Regler welche dann entweder direkt in Motornähe (im Kühlluftstrom) oder alternativ auch im Rahmen montiert werden können.
Regler Bauformen 4in1 oder klassisch:
Als Sonderlösungen gibt es vor allem auch für Quadcopter-Anwendungen sogenannte 4 in 1 ESCs bei denen auf einer Platine vier Regler integriert sind. Dies ist vor allem interessant um besonders kompakte Bauformen zu erreichen und um etwas Gewicht zu sparen.
Der Nachteil einer solchen Lösung ist, dass bei einer Beschädigung meistens der komplette Regler ausgetauscht werden muss und im schlimmsten Fall auch mehrere Regler auf einmal beschädigt werden können.
Was bedeutet OPTO oder BEC und welche Version ist besser?
BEC steht für Battery Elimination Circuit.
Die meisten modernen Multicopter ESCs sind mittlerweile als OPTO Lösung (das bedeutet ohne integriertes BEC) ausgeführt. Zu Anfangszeiten wurden oftmals normale ESCS aus Flugmodellen verwendet, dort hat ein Regler mit BEC seine Berechtigung da so ein zweiter Akku zur Versorgung des Empfängers entfallen kann.
Moderne Flight Controller haben aber oftmals eine eigene Spannungsversorgungseinheit (PMU) und das BEC der Regler ist damit überflüssig. Selbst wenn der FC keine eigene Spannungsversorgung verwendet wird immer nur ein BEC benutzt, bei einem Optocopter würden dann sieben Regler unnötig Wärme produzieren und die integrierten BECs bedeuten auch noch weiteres unnötiges Gewicht.
In unserem Beispiel planen wir 6 klassische OPTO Regler wie z.B. die 30A BULL TEC mit BLHELI Firmware ein Die Regler sind 6S fähig und mit maximal 500 Watt angegeben. Wir sind also auch für ein 6S Setup bestens gerüstet und haben noch alle Möglichkeiten offen. 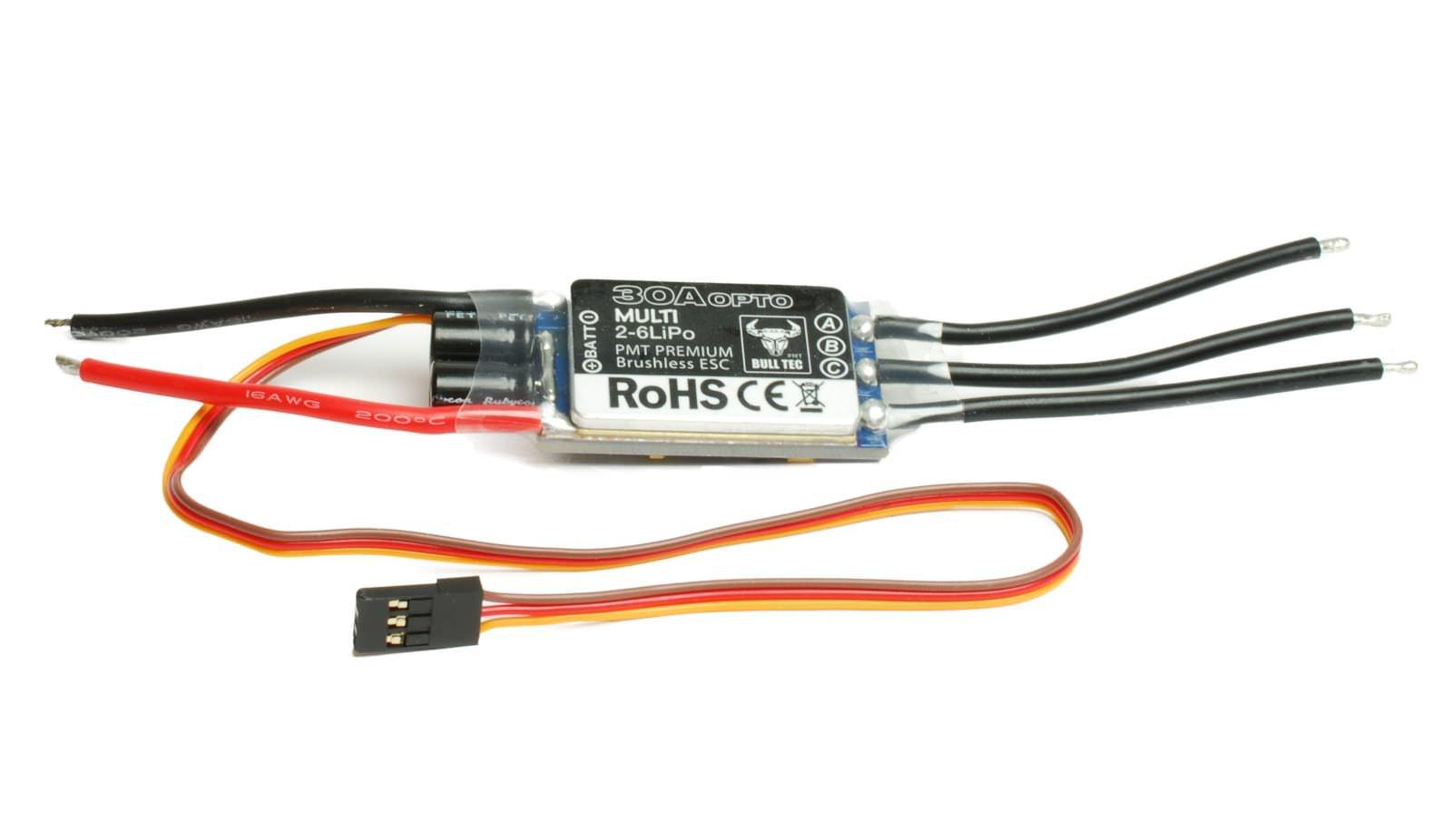 BULL TEC 30A ESC mit BLHeli Multicopter Firmware
BULL TEC 30A ESC mit BLHeli Multicopter Firmware
7.1.5 Die Wahl des passenden Flight Controllers (Multicopter Steuerung):
Den Flightcontroller (FC) oder auch Multicopter-Steuerung genannt, haben wir bereits im Zusammenhang mit der Spannungsversorgung des PMU Moduls sowie den Brushless Reglern kurz angesprochen.
Der Flightcontroller hat in der Grundfunktion die Aufgabe die Drohne zu stabilisieren. Dies geschieht dadurch, dass permanent anhand verschiedener Sensoren die tatsächliche Position mit der gewünschten Position verglichen wird und entsprechende Korrektursignale an die Brushless Regler gesendet werden um ggfs. gegenzusteuern oder die Signale der Fernsteuerung umzusetzen. Im Gegensatz zu einem Flugmodell drehen die Motoren also nicht für längere Zeit konstant sondern ändern ständig während des Fluges die Geschwindigkeit um z.B. eine Drehung oder einen Vorwärtsflug zu ermöglichen.
Je nach Ausstattung stehen als Sensoren hier z.B. Magnetometer, Barometer, GPS, usw. zur Verfügung. Viele Flight Controller der gehobenen Preisklasse bieten mittlerweile auch tolle Zusatzfunktionen wie z.B. ein OSD (On Screen Display), Wegpunkt-Nutzung oder Telemetrie Funktionen.
Vor allem GPS ist eine besonders interessante Funktion da dadurch relativ zuverlässig z.B. ein Halten der Position an einer vergebenen Höhe und Entfernung oder gar ein eigenständiger Rückflug und Einleiten der Landefunktion bei leerem Akku möglich ist (Return to Home Funktion).
Wichtig ist bei der Wahl des passenden Flight Controllers in erster Linie auch wieder die gewünschten Funktionen und den Einsatzzweck im Blick zu behalten.
Wir bieten auch viele preiswertere FC an, welche die Stabilisierung sehr gut übernehmen, aber eher für den FPV Racing Bereich gedacht sind. Dort sind schnelle Reaktionsraten gefordert, ein GPS Modul hingegen wäre nur unnötiges Gewicht. Für einen Videocopter wie in dieser Anleitung beschrieben suchen wir aber eher eine Lösung welche die Drohne gutmütig und sicher stabilisiert sodass hochwertige Videoaufnahmen möglich sind und auch ein Beginner sich eher auf das Filmen konzentrieren kann.
In unserem Pflichtenheft standen RTH (Return to Home) und GPS Unterstützung, daher ist die Auswahl schon einmal etwas begrenzter.
Wir haben hier zwei Grundvarianten zur Auswahl, welche unterschiedliche Philosophien verfolgen.
Variante 1: Open Souce Lösungen (z.B. auf Pixhawk Basis)
Variante 2: Herstellereigene Lösungen (z.B. DJI, Tarot)
Bevor wir näher auf die einzelnen Varianten eingehen, möchten wir kurz erst einmal die wesentlichen Unterschiede näher beleuchten. Größter Unterschied ist (wie der Name bei Variante 1) auch schon suggeriert die Art der dahinterstehenden Technologie. Unter Variante 1 fallen alle Controller welche auf einer Open Source Lösung basieren, d.h. in diesem Fall ist der Code öffentlich einsehbar und kann von jedem mit entsprechender Kenntnis auch angepasst und verändert werden. Die Entwicklung läuft stark Community getrieben ab und viele oftmals ehrenamtliche Helfer entwicklen das Projekt weiter oder teilen Ihre Verbesserungen welche dann übernommen werden.
Im Gegenzug dazu ist bei der Variante 2 der Code nicht einsehbar und der Kunde erhält lediglich Firmware-Updates durch den Hersteller. Anpassungen oder Erweiterungen durch den Kunden sind kaum möglich. Vorteil ist hingegen, dass getestete Versionen ausgeliefert werden, welche bei allen Kunden auf Grund der deutlich geringeren Einstell - und Anpassungsmöglichkeiten sehr ähnlich sind, d.h. die Einrichtung oder die Nutzung von "Mustersetups" ist für den Kunden oftmals einfacher.
Wir bieten beide Varianten an und beide Varianten haben unserer Meinung nach auch Ihre Berechtigung. In den letzten Jahren hat sich die Variante 1 mit Open Source Lösungen deutlich weiterentwickelt und ist vor allem auch für Anfänger viel benutzerfreundlicher geworden. Die (für viele Anfänger) oftmals langwierigen Einstellarbeiten sind durch gute und menügestützte Tools deutlich einfacher geworden, daher können wir nun auch interessierten Anfängern zu Pixhawk-Lösungen raten.
Weitere Infos zu Variante 1 (Open Source Lösung auf Pixhawk Basis):
Bei den Open Source Varianten für größere Multicopter ist hier vor allem Pixhawk zu nennen, da diese Art von Flightcontrollern sich sehr großer Beliebtheit erfreuen und vor allem auch im prof. Segment mit Abstand die meisten Nutzer verzeichnen.
Pixhawk ist 2008 aus einem Studentenprojekt der ETH Zürich entstanden und hat seitdem einen Erfolgszug angetreten und ist nun nicht mehr aus dem Multicopter-Segment wegzudenken. Es gibt hier verschiedene Abwandlungen und auch Hardware Versionen. Wir möchten hier nur auf die gängigsten Varianten eingehen. Da für viele Anfänger die Vielzahl an verschiedenen Möglichkeiten und Optionen oftmals nicht so einfach zu durchblicken sind, möchten wir in diesem Absatz einen Kurzüberblick geben, wie das Konzept Pixhawk funktioniert:
Grundsätzlich muss zwischen Hardware und Software unterschieden werden. Die Hersteller wie z.B. Hex Technology (ProfiCNC) und Holybro liefern die Hardware (den eigentlichen Flightcontroller), welcher dann mit verschiedenen Open-Source-Software Lösungen betrieben werden kann.
Die zwei bekanntesten Software Lösungen sind hierbei Ardupilot und PX4 , welche dann die Firmware des Flightcontrollers bilden. Interessanterweise muss dies nicht zwingend ein Multicopter sein, Ardupilot gibt es z.B. auch als Plane (für Flugzeuge), Rover (für Fahrzeuge) und sogar Sub (für Uboote) Version, welche dann natürlich jeweils andere Funktionen bieten, aber nach wie vor auf der gleichen Hardware laufen.
Hier ein paar Beispiel Links zu den Flightcontrollern:
 Cube Orange (Pixhawk 2.1) von Hex Technology
Cube Orange (Pixhawk 2.1) von Hex Technology
 Passendes GPS Modul für Cube Orange (ebenfalls von Hex Technology)
Passendes GPS Modul für Cube Orange (ebenfalls von Hex Technology)
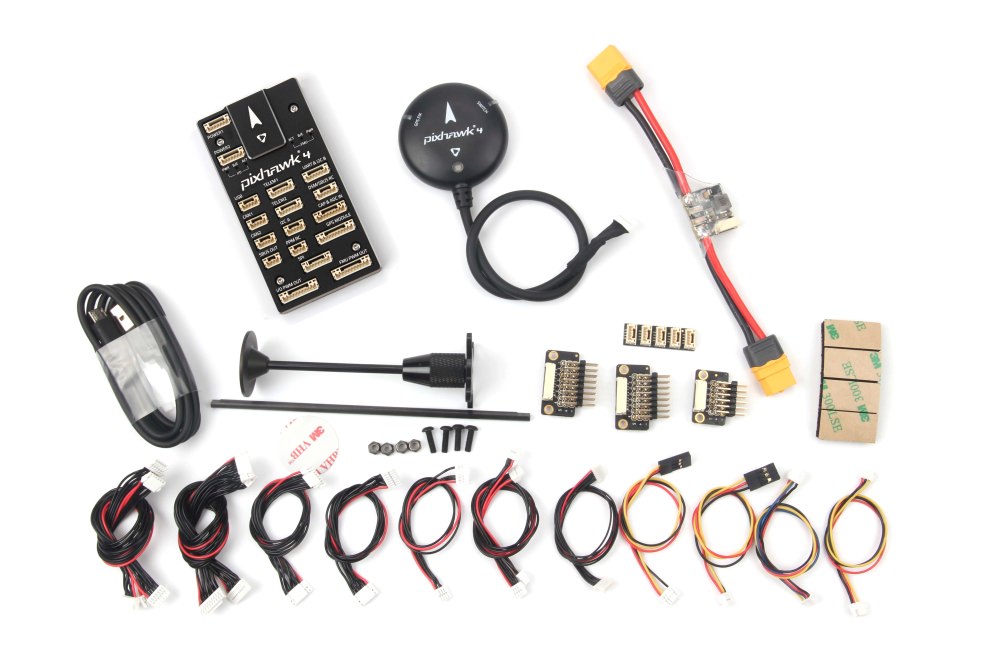 PX4 Pixhawk 4 Komplettset von Holybro
PX4 Pixhawk 4 Komplettset von Holybro
Schlussendlich wird noch eine "Ground Station Software" benötigt. Die Ground Station Software ist vereinfach gesagt die Bodenstation (z.B. ein PC, Laptop, Tablet,...) welcher mit dem Multicopter kommuniziert. Die Aufgaben und Möglichkeiten sind hier sehr vielfältig. Zum einen können Einstell - und Konfigurationsarbeiten (wie z.B. ein Firmware Update, Einstellung der Art des Rahmens, Zuweisung der Flugmodi,...) vorgenommen werden was die Ground Station Software in diesem Teil vergleichbar mit z.B. der Tarot GUI oder DJI GUI Software macht. Die Ground Station geht bei Pixhawk aber noch deutlich über diese Funktion hinaus. Es können z.B. alle Flugdaten per Telemetrie in Echtzeit angezeigt werden. Auch die Wegpunktplanung oder das Starten von automatischen Missionen ist aus der Ground Station heraus möglich. Die am weitesten verbreiteten Lösungen sind hier Mission Planner (läuft auf Windows und Mac OS X) sowie QGC - QGroundControl (läuft auf Windows, Mac OS X, Linux, Android und iOS).
Viele (vor allem professionelle) User bevorzugen Mission Planner auf Grund der vielen Einstellmöglichkeiten. QGC hingegen bietet im Gegenzug dazu auch die Möglichkeit z.B. auf einem Android Tablet genutzt werden zu können, was vor allem für mobile Einsätze sehr interessant ist. Auch eine Kombination beider Varianten ist möglich, so kann z.B. der Mission Planner für die Konfiguration und Einstellarbeiten genutzt werden und QGC dann später auf dem Flugfeld zur Überwachung der Drohne per Tablet.
Generell gibt es im Pixhawk System eine Vielzahl an Möglichkeiten und Zusatzoptionen um einen Multicopter mit Sensoren oder weiteren Features zu erweitern. So ist zum Beispiel die Nutzung von Lidar, mehreren GPS Modulen oder auch die Umsetzung einer RTK Lösung mit sehr wenig Aufwand möglich, da der Code all diese Optionen bereits bietet und die einzelne Funktionen lediglich noch aktiviert und konfiguriert werden müssen.
Auch die Telemetrie-Anbindung zur Fernsteuerung ist hier wirklich sehr gut. Für FrSky Fernsteuerungen gibt es das OpenSource Telemetrie-Script YAAPU,welches eine Liveübersicht über alle Daten des Copters auf dem Display der Fernsteuerung (Position, Flugzeit, Flugmodus, Satellitenanzahl,....) sowie auch Ansagen wie Batteriekapazität, Flugmodi, etc. bietet.
Eine weitere Neuheit möchten wir an dieser Stelle ebenfalls erwähnen:
 Herelink HD System - HD Downlink und Fernsteuerung in einem Produkt von Hex Technology
Herelink HD System - HD Downlink und Fernsteuerung in einem Produkt von Hex Technology
Das Herelink System kam 2019 auf den Markt und ist eine revolutionäre Neuerung. Es handelt sich um eine 2,4Ghz Fernsteuerung mit hoher Reichweite und gleichzeitig integriertem HD Downlink. Was bedeutet das nun?
Die Fernsteuerung basiert auf einer Android - Plattform, auf der Fernsteuerung läuft eine angepasste Version von QGC (QGroundcontrol) womit die Fernsteuerung gleichzeitig eine vollwertige "Ground Station" darstellt. Somit ist gleichzeitig eine Telemetrieüberwachung, Einstellung und Flug des Multicopters möglich.
Als weiteres Highlight ist eine digitale HD Übertragung auf das Display möglich. Der Herelink-Empfänger (Air Unit) im Modell hat zwei HDMI Eingänge, sodass zwei verschiedene Kameras genutzt werden können. (z.B. FPV Cam + HD Kamera / Gimbal). Über die Herelink Fernsteuerung kann bequem zwischen den beiden Quellen umgeschaltet werden.
Das Herelink System ist voll in die Pixhawk Architektur integriert und funktioniert z.B. perfekt mit dem Cube Orange des gleichen Herstellers, lässt sich aber auch problemlos mit PX4 FCs (z.B. mit der Holybro Serie) einsetzen.
Unsere Empfehlung aus der Variante 2 wäre in diesem Beispiel die Tarot ZYX-M.  Tarot ZYX-M Flight Controller mit GPS
Tarot ZYX-M Flight Controller mit GPS
Hierbei handelt es sich um eine Multicopter Steuerung mit GPS Funktion und zahlreichen Zusatzoptionen welche vom Hersteller Tarot entwickelt wurde. Abgerundet wird das Ganze durch ein sehr attraktives Preis-Leistung-Verhältnis. Diese Steuerung kann sowohl im kleinen Quadcopter bis zum großen Ocotopter universal eingesetzt werden und funktioniert dabei sehr sicher und zuverlässig. Die Konfiguration erfolgt dabei bequem per USB vom PC aus über eine eigene Software.
Als Zusatzmodule sind mit dem TL300C ein OSD Modul sowie mit dem ZYX-BD ein Bluetooth Modul verfügbar welches unter anderem auch die Nutzung von Wegpunkten ermöglicht.
 Tarot TL300C OSD Modul für Tarot ZYX-M
Tarot TL300C OSD Modul für Tarot ZYX-M  Tarot ZYX-BD Bluetooth Modul für Tarot ZYX-M
Tarot ZYX-BD Bluetooth Modul für Tarot ZYX-M
Für unser Beispiel haben wir uns einmal für die ZYX-M aus Variante 2 (vor allem aus Budget-Gründen) entschieden, ein Setup auf Pixhawk Basis ist aber genauso denkbar.
7.1.5 Die Wahl des passenden Lipo Akkus:
Durch die Kombination von Motoren und Propellern wird die Zellenzahl des Akkus quasi vorgebgeben was uns noch bleibt ist eine Überlegung der C-Zahl und der Kapazität.
Für die C-Zahl finden wir bei den meisten Akkus zwei Angaben. Eine kleinere Zahl für die konstante Belastung sowie eine größere (meistens 1,5-2 so große) Zahl für die Impulsbelastung, also die kurzzeitige Belastung.
Die C-Zahl Angabe bedeutet mit dem wieviel Fachen der Kapazität der Akku dauerhaft belastet werden kann.
Nehmen wir folgenden Akku als Beispiel:
4S 5000mAh 20C-30C
In diesem Fall sind die 20C die konstante Belastbarkeit und die 30C die Impuls Belastbarkeit.
20C * 5000mAh ergibt eine konstante Belastbarkeit von 100A
30C * 5000mAh ergibt eine Impuls Belastbarkeit von 150A
Was sagen uns diese Werte nun? Die Werte sagen aus, dass dieser verbaute Akku in unserem Multicopter theoretisch bis zu 100A dauerhaft belastet werden kann. D.h. bei einem Hexacopter könnte jeder Motor dauerhaft 16,6 A (100A / 6 Motoren) sowie kurzeitig sogar 25A (150A / 6 Motoren) ziehen. Diese Kalkulation ist nun sehr vereinfacht, da wir natürlich auch noch andere Komponenten wie den FC, Gimbal, Empfänger, ggfs. LED usw. versorgen müssen. Auch müssen die Kabel, Stecker, Verteilerplatine, etc. auch für diese Werte ausgelegt sein. Und zu guter Letzt muss der Akku diese Werte auch tatsächlich liefern können, viele Hersteller „schönen“ die C-Werte Ihrer Akkus um im Vergleich keinen Nachteil zu haben.
Da wir unsere Motoren nicht dauerhaft mit Vollgas betreiben, sondern das Setup so ausgelegt wurde, dass wir bereits bei rund 50% (2:1 Schubverhältnis) schweben können, benötigen wir mehr Schub nur zum Manövrieren und z.B. für Steigflüge, oder um den Copter ggfs. in einer Notsituation abzufangen.
Wir planen die C-Zahl also so, dass der Akku für den Schwebeflug + Puffer konstant belastet werden kann sowie dass in der Impuls-Belastung ebenfalls noch Reserven sind, sollten wir einmal tatsächlich Vollgas geben müssen. Klar ist auch, dass ein Akku welcher permanent am Limit betrieben wird in der Spannung schneller einbricht.
7.1.3 Userfrage: Wieso nehme Ich nicht einfach den Akku mit der größten Verfügbaren C-Zahl?:
Wer obigen Text gelesen hat könnte nun einfach sagen, Ich nehme den Akku mit der höchsten C-Zahl am Markt und muss mir über all die Probleme dann gar keine Gedanken machen?
Diese Vorgehensweise hätte gleich zwei Nachteile. Zum einen besteht zwischen C-Zahl und Preis ein Zusammenhang, d.h. ein Akku mit 10C-20C ist in der Regel deutlich preiswerter als ein 25C-40C oder gar 50C-90C Modell. Viel gravierender ist aber das Gewicht. Zellen mit höherer C-Rate sind deutlich schwerer sodass wir im Grunde unnötiges Gewicht mit uns herumfliegen welches uns in der Nutzung keinerlei Vorteile bringt (ob wir einen 15C Akku mit 5C oder einen 50C Akku mit 5C belasten wird kaum messbare Unterschiede ergeben, der Gewichtsvorteil des 15C ist allerdings signifikant).
Beispiel für unseren Tarot 680 Pro Hexacopter:
| Motor | Gewicht (g) | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Ampere pro Motor (A) | Ampere Gesamt | C-Belastung bei 5000mAh | C-Belastung bei 100 Wh | mAh bei 15C Belastung |
| T-Motor MN3510 | 97 | 700 | 14,8 | 13x4.4CF | 50% | 4,7 | 28,2 | 5,64 | 4,17 | 1880 |
| 100% | 19,4 | 116,4 | 23,28 | 17,23 | 7760 | |||||
| T-Motor MN3508 | 82 | 700 | 14,8 | 12x4.4CF | 50% | 3,8 | 22,8 | 4,56 | 3,37 | 1520 |
| 100% | 16,1 | 96,6 | 19,32 | 14,30 | 6440 | |||||
| T-Motor MN3510 | 97 | 360 | 22,2 | 13x4.4CF | 50% | 1,8 | 10,8 | 2,16 | 2,40 | 720 |
| 100% | 7,5 | 45 | 9 | 9,99 | 3000 | |||||
| T-Motor MN3508 | 82 | 380 | 22,2 | 13x4.4CF | 50% | 2,1 | 12,6 | 2,52 | 2,80 | 840 |
| 100% | 8,4 | 50,4 | 10,08 | 11,19 | 3360 |
Wir haben für unsere vier ausgewählten Motoren nun einmal ein Paar Daten durchgerechnet.
Wir haben die Tabelle hierzu um einige Spalten erweitert um die Zusammenhänge von C-Zahl, Spannung und Kapazität nochmals zu verdeutlichen..
Ampere Gesamt:
Es handelt sich um die Summe für alle sechs Motoren im Schwebeflug (50%) sowie bei Vollgas (100%).
Bsp: 4,7A * 6 Motoren = 28,2 Ampere Gesamt
C-Belastung bei 5000mAh
Die Spalte C-Belastung bei 5000mAh dient als Beispiel wie hoch die C-Belastung für einen genutzten Akku mit 5000mAh Kapazität wäre.
Wir teilen hierzu die Gesamten Ampere durch die Kapazität des Akkus:
Bsp: 28,2A / 5Ah (5000mAh) = 5,64C
Hier wird deutlich, dass der Akku mit 14,8V höher belastet wird. Wieso ist das nun so? Viele werden es schon ahnen, es kommt wieder der oftmals genannte Grundsatz Ampere * Volt = Watt zu tragen. Der 22,2V (6S) Lipo verfügt über die 1,5x Spannung weshalb die Ampere entsprechend geringer ausfallen. Im Umkehrschluss ist der Akku aber entsprechend größer und schwerer, da er aus sechs statt nur vier Zellen besteht.
C-Belastung bei 100Wh
Um nun die tatsächliche Belastung zu vergleichen rechnen wir das Ganze auf Wattstunden um und machen die Betrachtung damit unabhängig von der verwendeten Spannung.
Unser Beispiel Akku hat nun 100Wh und wir möchten die C-Belastung mit diesem Akku für die einzelnen Motoren wissen (somit ist es egal, ob es sich um einen Akku mit 100V und 1A oder um einen Akku mit 1V und 100A handeln würde).
Bsp: 28,2A / (100 Wh / 14,8V) = 4,17C
Wie zu vermuten war fallen die Abstände zwischen 14,8V und 22,2V nun geringer aus.
mAh bei 15C Belastung:
Um das Ganze abzuschließen rechnen wir nun umgekehrt und wollen wissen wie hoch die Kapazität eines Akkus mindestens sein muss damit dieser mit max. 15C belastet wird.
Hierzu nutzen wir die folgende Formel:
15C = Ampere Gesamt / (Wh / Spannung)
Nach Umstellen erhalten wir das Ergebnis:
1880mAh.
Wir würden also einen 4S Akku mit mindestens 1880mAh benötigen damit im Schwebeflug die C-Zahl nicht bei über 15C liegt.
FPV Komponenten:
Zur Auswahl der FPV Komponenten wird in Kürze ein eigener Artikel erscheinen, wir entscheiden uns für diese Kalkulation für einen 25mW Sender von ImmersionRC mit passender Antenne.
7.1.8 Sonstige Komponenten und Kleinteile:
Unter diesen Punkt fällt alles sonstiges Zubehör und Kleinteile wie z.B. Verteilerplatine, Kabel, Stecker, usw. Die Auswahl ist natürlich stark abhängig von den sonstigen verwendeten Komponenten und der genauen Montageposition.
Wir haben z.B. auch fertig zusammengestellte Kabelsets für Tarot Rahmenmodelle im Sortiment, diese bieten bereits die passenden Verlängerungskabel, Goldstecker und Schrumpfschläche um alle gängigen Motoren und Regler zu montieren. Es fehlt dann nur noch ein Stecker passend zum eingesetzten Lipo Akku.
 Kabelset für Tarot 680 Pro Hexacopter
Kabelset für Tarot 680 Pro Hexacopter
7.2 Ergebnis unseres Setups und Anmerkungen:
Bis hierhin haben wir uns nun Punkt für Punkt den einzelnen Komponenten genährt, haben aber noch nicht festgelegt welche Motoren genau genutzt werden und wie groß unser Akku genau ausfallen wird.
Fassen wir bis hierhin einmal alle Komponenten in einer Exceltabelle zusammen um schon einmal ein Gefühl für das Gewicht zu bekommen. Bei den Motoren haben wir die schwerere Version angesetzt (sollten wir die leichtere Variante einsetzen, würden wir nochmals ca. 80g Gewicht sparen):
| Komponente | Artikelname / Erläuterungen: | Stückzahl | Gewicht pro Artikel | Gesamtgewicht in g |
| Rahmen | Tarot Ironman 680 Pro Hexacopter | 1 | 780 | 780 |
| Rahmen Zubehör | Elektrische Landegestell Tarot TL65B43 Set | 1 | 90 | 90 |
| Motoren | T-Motor MN3508 oder MN3510 (noch offen) | 6 | 100 | 600 |
| Regler | BULL TEC 30A Opto BLHeli | 6 | 28 | 168 |
| Propeller | T-Motor 13x4.4 Carbon Propeller | 3 | 35 | 105 |
| Flight Controller | Tarot ZYX-M mit GPS | 1 | 100 | 100 |
| Gimbal mit Kamera | Tarot TL3T01 + GoPro | 1 | 400 | 400 |
| Empfänger | FrSky X8R | 1 | 20 | 20 |
| Stecker, Kabel, Kleinteile | Verteilerplatine + PMT Kabel Set für 680 Pro | 1 | 120 | 120 |
| FPV Sender + Antenne | ImmersionRC 25mW + Spironet Antenne | 1 | 30 | 30 |
| Reserve | Reserve für Kalkulationsfehler, ungenaue Gewichte, usw. | 100 | ||
| Sonstige Nutzlast | Reserviert für zukünftige Erweiterungen | 400 | ||
| Maximales Gewicht | Max. Abfluggewicht, vorgegben durch unseren Anwendungszweck | 4999 | ||
| Gesamtgewicht derzeit | 2513 | |||
| Rest für Akku | 2486 | |||
| Gesamtgewicht inkl. 400g Reserve | 2913 | |||
| Rest für Akku | 2086 |
Die Propeller werden immer paarweise verkauft, daher sind nur 3 Sets (6 Stück) enthalten.
Die gewünschte Nutzlast haben wir zum einen als Komponenten (Gimbal + Kamera) zum anderen als sonstige Nutzlast mit aufgeführt. Wir planen diese bereits jetzt mit ein, für die Flugzeitbetrachtung können wir dann immer noch eine separate Rechnung ohne diese Nutzlast durchführen um exaktere Werte zu bekommen.
Zusätzlich haben wir noch 100g Reserve für unvorhergesehene Komponenten, ungenaue Gewichtsangaben, usw. eingeplant. Dieser Wert kann natürlich schwanken. Wer die Komponenten exakt kennt oder ggfs. schon besitzt kann den Wert natürlich verringern.
Wir landen somit bei einem Gesamtgewicht ohne Akku von 2913g, womit uns maximal 2086g Gewicht für einen Akku übrig bleiben würden. An dieser Stelle hätten wir die Wahl ggfs. die 400g Reserve ebenfalls noch für den Akku mit einzuplanen sofern derzeit noch nicht klar ist wofür diese zusätzliche Nutzlast genutzt werden soll um in der jetzigen Situation eine höhere Flugzeit zu erreichen. Wir hätten unter Umständen dann aber das Problem, dass, sofern wir die Nutzlast später doch einsetzen werden, unser Akku (und somit auch unser Gesamtgewicht) zu schwer wäre, daher planen wir für die Berechnung der maximalen Akkugröße die zukünftige Nutzlast ebenfalls mit ein.
7.2.1 Auswahl der Akkugröße:
Natürlich könnten wir in einem mathematischen Optimerungsverfahren bestimmen welche Akkugröße optimal ist, d.h. bei welcher mAh Zahl wir durch eine weitere Erhöhung der Kapaziät keine längere Flugzeit mehr erreichen können, da das zusätzliche Gewicht des Akkus dann zu stark ins Gewicht fällt. In der Praxis hilft uns dieser Wert allerdings nur bedingt weiter, da wir Akkus nicht beliebig stückeln können sondern auf vorhandene Größen zurückgreifen müssen. Auch wenn z.B. ein 7733,43mAh Akku optimal wäre, haben wir nur die Wahl zwischen 7000mAh und 8000mAh, wobei selbst 7000mAh nicht bei allen Herstellern erhältlich ist.
Für diese Praxisrechnung wählen wir daher die folgenden vier Größen 7000mAh, 8000mAh und 10000mAh, 14000mAh ( Parallelschaltung aus 2x 7000mAh) aus welche alle noch unterhalb unseres Maximalgewichtes liegen.
| Akkutyp | Kapazität (mAh) | Spannung (V) | C-Zahl | Gewicht (g) | Wattstunden (Wh) | Gramm pro Wattstunde | |
| SLS APL | 7000 | 22,2 | 25C-40C | 886 | 155,4 | 5,70 | |
| SLS APL | 8000 | 22,2 | 25C-40C | 1206 | 177,6 | 6,79 | |
| SLS APL | 10000 | 22,2 | 25C-40C | 1392 | 222 | 6,27 | |
| SLS APL (2x 7000mAh) | 14000 | 22,2 | 25C-40C | 1772 | 310,8 | 5,70 | |
7.2.2 Für welchen Motor sollen wir uns nun entscheiden?
!Achtung! Bei der folgenden Vorgehensweise handelt es sich nur um eine grobe Berechnung, da wir zum einen die Effizienzwerte zwischen den Motoren nur bewerten können und zur einfacheren Berechnung zudem einen lineareren Zusammenhang zwischen Schub und Watt unterstellen, was in der Realität nicht der Fall ist. Da wir uns aber relativ nahe an den Messpunkten befinden sind die Ungenauigkeiten für eine erste Betrachung vertretbar.
Wem das aber noch nicht genug ist, der findet unter dem Punkt: Für Fortgeschrittene eine detaillierte Berechnungsgrundlage wie sich anhand der Schubdaten aus einer Auswahl von Motoren der „beste“ berechnen lässt und die Flugzeit noch weiter optimiert werden kann. Dort werden wir dann auch zum Thema Akku nochmals weiter ins Detail gehen.
Da wir nun einen Überblick haben wieviel unsere Komponenten ca. wiegen können wir uns an die genaue Berechnung des benötigen Schubes und damit an die finale Auswahl der Motoren und des Akkus machen.
Vorab sei gesagt, dass man mit keinem der Motoren aus unserer Liste etwas „falsch“ machen würde, alle erfüllen unsere Vorgaben. Auch das Budget hat natürlich einen Einfluss darauf, ob man sich eher für ein 4S oder 6S Setup entscheiden wird, von welchem Hersteller die Motoren stammen und ob Carbon Propeller oder doch eher eine Nylon-Carbon Mischung eingesetzt werden. Für viele Hobbyanwender ist der Preis ein entscheidender Punkt und oftmals wichtiger als die letzte Minute Flugzeit.
Wir zeigen nun Anhand einer einfachen "Faustformel" welcher der Motoren aus der Auswahl am effizientesten wäre. Um den Rahmen nicht zu sprengen begrenzen wir den Vergleich auf die 6S Varianten. Die Rechnung würde aber für die 4S Varianten analog erfolgen und über die Wattstunden des Akkus kann zusätzlich eine Vergleichbarkeit zwischen den Spannungen geschaffen werden.
Ziel ist es nun die Schubdaten der Motoren vergleichbar zu machen. Daher rechnen wir die Daten der Motoren auf eine gemeinsame "Schubgröße" um, um Anhand der erreichten Gramm pro Watt (g/W) den effizientesten Motor auszuwählen.
Als Basisgewicht nehmen wir wieder unsere 2513g für die MN3510 Variante sowie 2393g für die MN3508 Variante (der Motor ist jeweils 20g leichter).
| Motor | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Akkumodell | Akkugewicht (g) | Gesamtgewicht (g) | Ampere (A) | Watt (W) | Schub pro Motor (g) | Schub Gesamt (g) | Effizienz (g/W) |
| T-Motor MN3510 | 360 | 22,2V | 13x4.4CF | 50% | - | - | - | 1,8 | 40 | 460 | 2760 | 11,5 |
| 65% | - | - | - | 3,4 | 75 | 730 | 4380 | 9,73 | ||||
| 7000mAh | 886 | 3399 | 566,5 | 3399 | 11,5 > x > 9,73 | |||||||
| 8000mAh | 1206 | 3719 | 619,8 | 3719 | 11,5 > x > 9,73 | |||||||
| 10000mAh | 1392 | 3905 | 650,8 | 3905 | 11,5 > x > 9,73 | |||||||
| 14000mAh | 1772 | 4285 | 714,2 | 4285 | ≈ 9,73 | |||||||
| 100% | - | - | 7,5 | 166 | 1300 | 7800 | 7,83 | |||||
| T-Motor MN3508 | 380 | 22,2V | 13x4.4CF | 50% | - | - | - | 2,1 | 46 | 550 | 3300 | 11,96 |
| 65% | - | - | - | 3,7 | 83 | 810 | 4860 | 9,76 | ||||
| 7000mAh | 886 | 3279 | 546,5 | 3279 | ≈ 11,96 | |||||||
| 8000mAh | 1206 | 3599 | 599,8 | 3599 | 11,96 > x > 9,76 | |||||||
| 10000mAh | 1392 | 3785 | 630,8 | 3785 | 11,96 > x > 9,76 | |||||||
| 14000mAh | 1772 | 4165 | 694,2 | 4165 | 11,96 > x > 9,76 | |||||||
| 100% | - | - | 8,4 | 185 | 1380 | 8280 | 7,46 |
In einer optimalen Welt hätten wir für genau jeden % Schubwert Messdaten zu Ampere und Schub um die Effienz in Gramm pro Watt exakt berechnen zu können. Seitens T-Motor haben wir allerdings "nur" 5 Messpunkte vorliegen, nämlich für 50%, 65%, 75%, 85% und 100%. Die bereits vorhandenen Werte haben wir mit in die Tabelle übernommen und Orange gekennzeichnet. Als einfachstes Mittel können wir nun Anhand der bereits vorhandenen Werte die Effizienz der noch fehlenden Werte bewerten da wir aus unseren bisherigen Erkenntnissen wissen, dass die Effizienz bei weniger Schub weiter zunehmen wird und bei mehr Schub weiter abnehmen wird.
Wir haben nun in der Tabelle für alle Gesamtgewichte (welche sich aus Setupgewicht + Akkuvarianten ergeben) die benötigen Schubwerte für den Schwebeflug berechnet.
Beispielzeile:
10000mAh 1392 3785 630,8 3785 11,96 > x > 9,76
Der 10000mAh Akku wiegt 1392g und ergibt somit ein Gesamtgewicht von 3785g (1392g Akku + 2393g Restkomponenten). Diese 3785g geteilt durch 6 Motoren ergibt einen benötigten Schub pro Motor von 630,8g.
In unserem Beispiel liegen alle Daten unter der 65% Schub Grenze für die wir bereits einen genauen Wert vorliegen haben. Beim MN3508 Motor können wir somit feststellen, dass alle unsere Akkukombinationen auf jeden Fall über einer Effizienz von 9,76 liegen (Effizienz bei 65%) aber unter 11,96 (Messpunkt von 50% Schub). Der Wert für einen 7000mAh Lipo liegt ziemlich genau an der 50% Marke, der Wert für den 8000mAh Lipo ca. 10% darüber, wir können also auch hier noch von einem Wert von ca. 11 ausgehen.
Auch wenn wir uns die Werte mit 14000mAh ansehen merken wir schnell, dass der MN3508 noch über 100g Schub pro Motor vom 65% Messpunkt entfernt ist, der MN3510 hingegen nur noch ca. 15g. Daraus lässt sich schlussfolgern, dass der MN3508 für unseren Einsatzzweck die effizientere Wahl wäre. Da die Motoren pro Stück auch noch einige Euro preiswerter sind, fällt uns die Entscheidung umso leichter.
7.2.3 Berechnung der Flugzeit für die verschiedenen Akkus:
Für die Berechnung der Flugzeit müssen wir nun eine weitere Vereinfachnung vornehmen. Da wir wissen, dass alle unsere gewünschten Werte zwischen 50% und 65% liegen nehmen wir nun den Mittelwert dieser beiden Effizienzwerte und rechnen mit diesem fixen Effizienzwert die benötigten Ampere und Watt für unsere verschiedenen Gesamtgewichte aus. Durch die Nutzung des Mittelwertes gewinnen wir schon einmal deutlich an Genauigkeit da wir nicht einen rein linearen Zusammenhang vom effizientesten Messpunkt aus anstellen, was unser Ergebnis deutlich verfälschen würde.
Wir nehmen also die 50% und 65% Messpunkte, addieren sie und teilen diese dann durch zwei:
(11,96 + 9,76) / 2 = 10,86 Gramm Schub / Watt durchschnittliche Effizienz
Setzen wir diesen Wert nun in unsere Tabelle ein, können wir Anhand der Effizienz die noch fehlenden Daten vervollständigen:
Beispielrechnung:
Bestimmung der Watt: 546,5 Gramm Schub / 10,86 Effizienz = 50 Watt
Bestimmung der Ampere: 50 Watt / 22,2V = 2,3A
| Motor | KV-Zahl | Spannung (V) | Propeller | Schub (%) | Akkumodell | Akkugewicht (g) | Gesamtgewicht (g) | Ampere (A) | Watt (W) | Schub pro Motor (g) | Schub Gesamt (g) | Effizienz (g/W) |
| T-Motor MN3508 | 380 | 22,2 | 13x4.4CF | 50% | - | - | - | 2,1 | 46 | 550 | 3300 | 11,96 |
| 65% | - | - | - | 3,7 | 83 | 810 | 4860 | 9,76 | ||||
| 7000mAh | 886 | 3279 | 2,3 | 50 | 546,5 | 3279 | 10,86 | |||||
| 8000mAh | 1206 | 3599 | 2,5 | 55 | 599,8 | 3599 | 10,86 | |||||
| 10000mAh | 1392 | 3785 | 2,6 | 58 | 630,8 | 3785 | 10,86 | |||||
| 14000mAh | 1772 | 4165 | 2,9 | 64 | 694,2 | 4165 | 10,86 | |||||
| 100% | - | - | 8 | 185 | 1380 | 8280 | 7,46 |
Da wir den Akku nicht ganz leer fliegen können benötigen wir immer etwas Reserve (bei Entnahme von 100% wären die Zellen auch kurz vor der Tiefentladung). Wir haben in der Tabelle einmal für 10% und 15% Restkapazität die Werte ermittelt.
Der Verbrauch und damit die Flugzeit für eine gewisse Akkugröße lässt sich nun leicht berechnen:
Beispielrechnung:
Zuerst bestimmen wir die gesamten Ampere für die Drohne (alle 6 Motoren)
2,3A * 6 (Motoren) = 13,6 A
Verfügbare Kapazität:
7000mAh * 0,90 = 6300mAh (10% Restkapazität verbleiben im Akku)
7000mAh * 0,85 = 5950mAh (15% Restkapazität verbleiben im Akku)
mAh Verbrauch pro Minute:
(Gesamt A / 60 (da pro Minute) ) * 1000 (Umrechung von Ah zu mAh)
(13,6A / 60 ) * 1000 = 226,68 mAh (pro Minute)
Unsere Drohne benötigt also bei einem Gewicht von 3279g 227,68mAh pro Minute um zu schweben.
Berechnung der Flugzeit:
Für die Berechnung der Flugzeit teilen wir nun nur noch die verfügbare Kapazität durch unseren Verbrauch pro Minute:
Verfügbare Kapaziät / Verbrauch pro Minute = Flugzeit in Minuten
6300mAh / 227,68mAh = 27,8 Minuten Flugzeit
Es handelt sich hierbei wohlgemerkt um die Schwebeflugzeit (also dem Punkt, an welchem die Drohne genau schweben würde). Jegliche Bewegungen, Steigflüge usw. werden den Verbrauch entsprechend ansteigen lassen.
Was wir anhand der Tabelle ebenfalls schön sehen können ist, wie sich das Zusatzgewicht des größeren Akkus bemerkbar macht. Zwischen 7000mAh Kapaziät und 14000mAh Kapaziät nimmt der Stromverbrauch um knapp 27% zu. Die Flugzeit steigt mit Verdopplung der Kapaziät um "nur" 60% an. Es wird also auch deutlich, dass sich die Flugzeit durch Zuhilfenahme größerer Akkus nicht beliebig verlängern lässt und der "Mehrnutzen" immer geringer wird. Die Erkenntnis des abnehmenden Grenznutzens wird uns im Punkt 7.3 nochmals begegnen.
| Motor | KV-Zahl | Spannung (V) | Propeller | Akku | Abfluggewicht | Ampere | Watt | Schub (in g): | Verbrauch pro Minute (mAh) | Flugzeit (in Minuten): | ||||
| Kapazität | TOW (g) | Motor | Gesamt | Motor | Gesamt | Motor | Gesamt | 10% Restkapazität | 15% Restkapazität | |||||
| T-Motor MN3508 | 380 | 22,2 | 13x4.4CF | 7000mAh | 3279 | 2,3 | 13,6 | 50 | 302 | 546,5 | 3279 | 226,68 | 27,8 | 26,2 |
| 8000mAh | 3599 | 2,5 | 14,9 | 55 | 331 | 599,8 | 3599 | 248,80 | 28,9 | 27,3 | ||||
| 10000mAh | 3785 | 2,6 | 15,7 | 58 | 349 | 630,8 | 3785 | 261,66 | 34,4 | 32,5 | ||||
| 14000mAh | 4165 | 2,9 | 17,3 | 64 | 384 | 694,2 | 4165 | 287,93 | 43,8 | 41,3 | ||||
7.2.4 Budget und Kompromisse:
Bisher haben wir in der Berechnung dieses Beispiels immer parallel auf die Preise geachtet um sicherzustellen, dass wir im Budget bleiben. Auch wer bisher noch Einsteiger ist bekommt relativ schnell einen Blick dafür wieviel die Grundkomponenten ca. kosten werden.
Klar ist natürlich, dass beim Sprung von Quadcopter zu Hexacopter oder Octocopter alleine durch die Anzahl an Motoren, Reglern und Propellern der Preis immer hochgehen wird. Die Sprünge laufen nicht ganz linear, da in der Regel ja z.B. beim Vergleich von Quad zu Hexa auf Grund der höheren Anzahl an Komponenten die Motoren und Propeller etwas kleiner ausfallen können und so nicht ganz das 1,5x Budget eingeplant werden muss. Nichtsdestotrotz ist die Wahl der Bauform oft auch budgetbedingt.
7.3 Für Fortgeschrittene: Detaillierte Berechnungen zur Optimierung der Flugzeit:
In diesem Punkt steigen wir nun noch tiefer in die Kalkulation und Optimierung der Flugzeit ein. Wir lassen den Preis der Komponenten einmal außen vor und konzentrieren uns lediglich darauf was maximal möglich wäre, unabhängig vom Preisniveau der Komponenten.
Natürlich gibt es für solche Berechnungen auch die Möglichkeit Tools wie z.B. Ecalc zu Rate zu ziehen, wir werden aber einmal zeigen wie es auch ohne geht.
Für diesen Schritt ist es dann auf jeden Fall auch sinnvoll eine Tabellenkalkulation zu bemühen, da wir verschiedene Formeln benötigen.
Wir werden in Kürze unsere Musterkalkulation zur Verfügung stellen, sodass die Daten direkt genutzt werden können.
8. Könnt Ihr mir nicht eine Drohne zusammenstellen oder konkrete Empfehlungen geben?
Sehr gerne können wir Interessenten bei der Zusammenstellung eines Setups weiterhelfen.
Viele Kunden stellen sich beispielsweise ein Setup selbstständig zusammen und senden uns dann eine Liste per Email zu in der ersichtlich ist welche Komponenten sie gerne als Setup gemeinsam einsetzen würden. Wir können dann gerne dieses Setup prüfen ob die Komponenten kompatibel sind und ob zum Beispiel eine gewisse vom Kunden vorgegebene Flugzeit oder ein Gewicht realisiert werden kann. Gerne machen wir dann auch Verbesserungsvorschläge und weisen auf Fehler hin.
Wir kennen unsere Produkte sehr genau und können Sie daher gerne mit hilfreichen Tipps versorgen. Auch falls Sie Maße oder sonstige Daten zu Komponenten benötigen welche bisher nicht in der Artikelbeschreibung stehen, werden wir Ihnen gerne weiterhelfen.
Alternativ können wir auch die gesamte Planung und Zusammenstellung der neuen Drohne für unseren Kunden übernehmen. Wir müssen in diesem Fall lediglich die Information aus dem zuvor beschriebenen 10-Punke-Katalog vorliegen haben, damit sicher gestellt werden kann, dass der Anwender hinterher auch Freude am Produkt hat und wir individuellen Wünschen entsprechen können.
Sehr gerne nehmen wir auch Herausforderungen für die Realisation eines eher ungewöhnlichen Setups an.
Wir geben unser Bestes um aus der geträumten Drohne eine echte Drohne werden zu lassen.
9. Bietet Ihr auch Komplettsets - Ready to Fly (RTF) an?
Wie unter Punkt 8 schon besprochen können wir sehr gerne eine passende Drohne empfehlen, ein Setup nochmals vor Bestellung durchprüfen oder Empfehlungen abgeben.
Aber an dieser Stelle endet unser Service noch nicht :)
Wir bieten auch den Aufbau und die kompletten Einstellarbeiten für Ihre Drohne an. Dies gilt sowohl für eine individuelle Zusammenstellung oder auch für die von uns angebotenen Antriebssets und Rahmensets.
Sie haben Interesse an einem individuellen Projekt? - Kontaktieren Sie uns jetzt - Wir freuen uns auf Ihre Anfrage.
Zudem bieten wir auch einige, von uns ausgewählte und optimal zusammengestellte RTF Sets an. Diese Sets zeichnen sich durch eine hochwertige Komponentenauswahl, gute Ersatzteilversorgung sowie von uns eingestellte und perfekt zueinander passende Komponenten aus.
Diese Sets werden von vielen Kunden eingesetzt und basieren auf Praxiserfahrungen.
Hier finden Sie den Link zu unserem PM Q-685 Carbon Quadcopter Set mit Herelink System welches für 500-100g Nutzlast ausgelegt ist und bis zu 55 Minuten Flugzeit bietet:
 PM Q-685 klappbarer Carbon Quadcopter Rahmen - RTF Komplettset
PM Q-685 klappbarer Carbon Quadcopter Rahmen - RTF Komplettset
Natürlich können wir auch dieses Set noch individuell für Sie weiter anpassen.
10. Rechtliche Bestimmungen zum Betrieb:
Hierzu wird in Kürze ein eigener Artikel erscheinen.