Matek H743-WLITE STM32H7 Flightcontroller 480Mhz, Ardupilot CAN BUS










inkl. MwSt. zzgl. Versandkosten
Versandkostenfreie Lieferung
innerhalb Deutschlands
Lagerartikel, ca. 1-3 Werktage
Lieferzeit innerhalb Deutschlands
- Artikel-Nr.: PM-6202
- Hersteller: Matek Systems
- Artikelname: H743-WLITE
- EAN: 4250902361020
Matek H743-WLITE STM32H7 Flightcontroller 480Mhz, Ardupilot CAN BUS
STM32H743VIH6, ICM42688-P, DPS310, OSD, 7x UARTs, 1x CAN, 2x I2C, 12x PWM outputs, 3x BEC
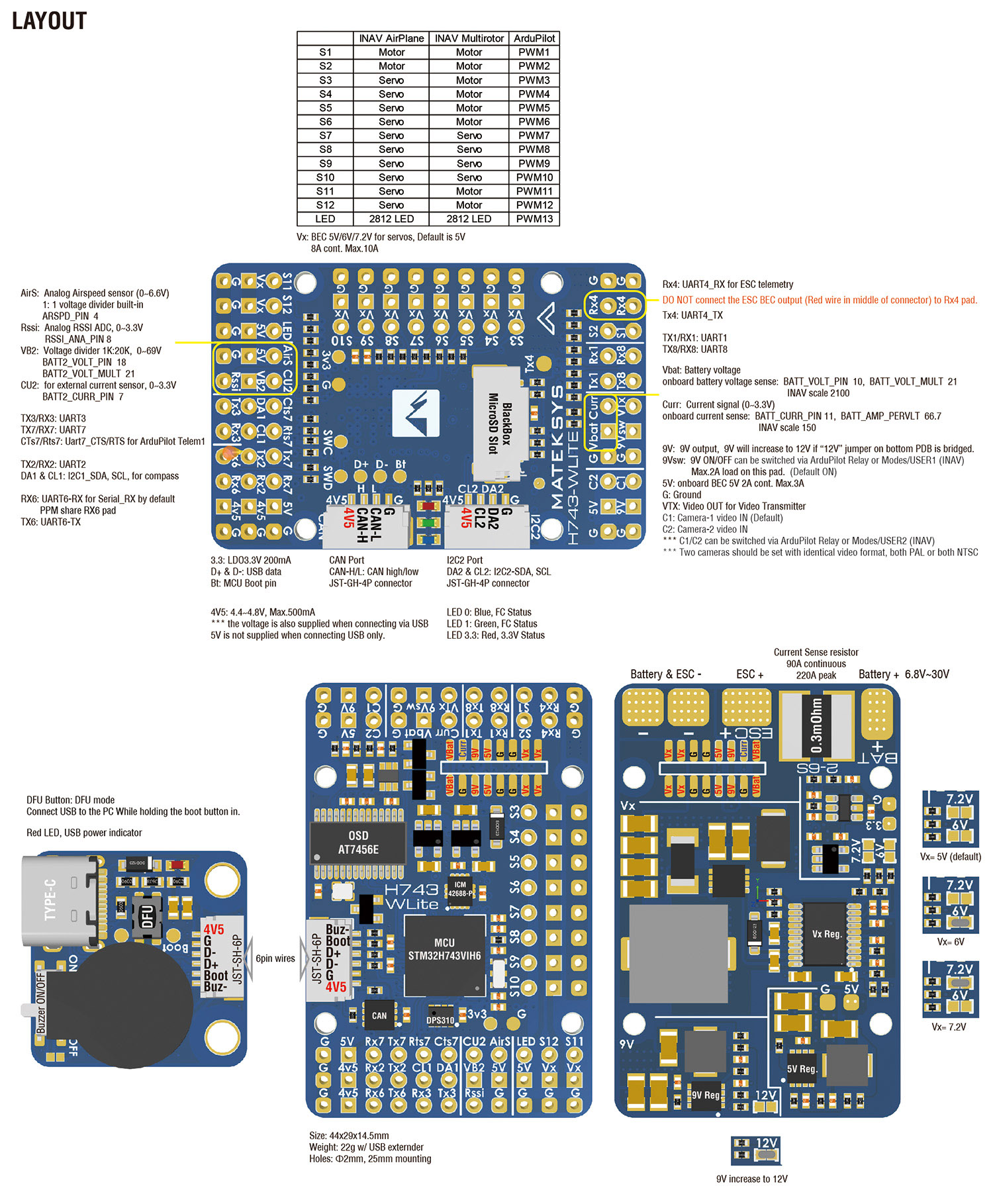
FC Specifications
- MCU: STM32H743VIH6, 480MHz , 512KB RAM, 2MB Flash
- IMU: ICM42688-P
- Baro: DPS310 (I2C2)
- OSD: AT7456E
- Blackbox: MicroSD card slot (SDIO)
- 7x Uarts (1,2,3,4,6,7,8) with built-in inversion.
- 13x PWM outputs(12+LED)
- 6x ADC (VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2)
- 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
- 2x I2C
- 1x CAN
- USB/Beep Extender with Type-C(USB2.0)
- Dual Camera Inputs switch
- 9V(12V) for VTX power switch
- High-precision Current Sense, 220A range
- ADC VB2 voltage divider: 1K:20K
- ADC AirSpeed voltage divider: 20K:20K
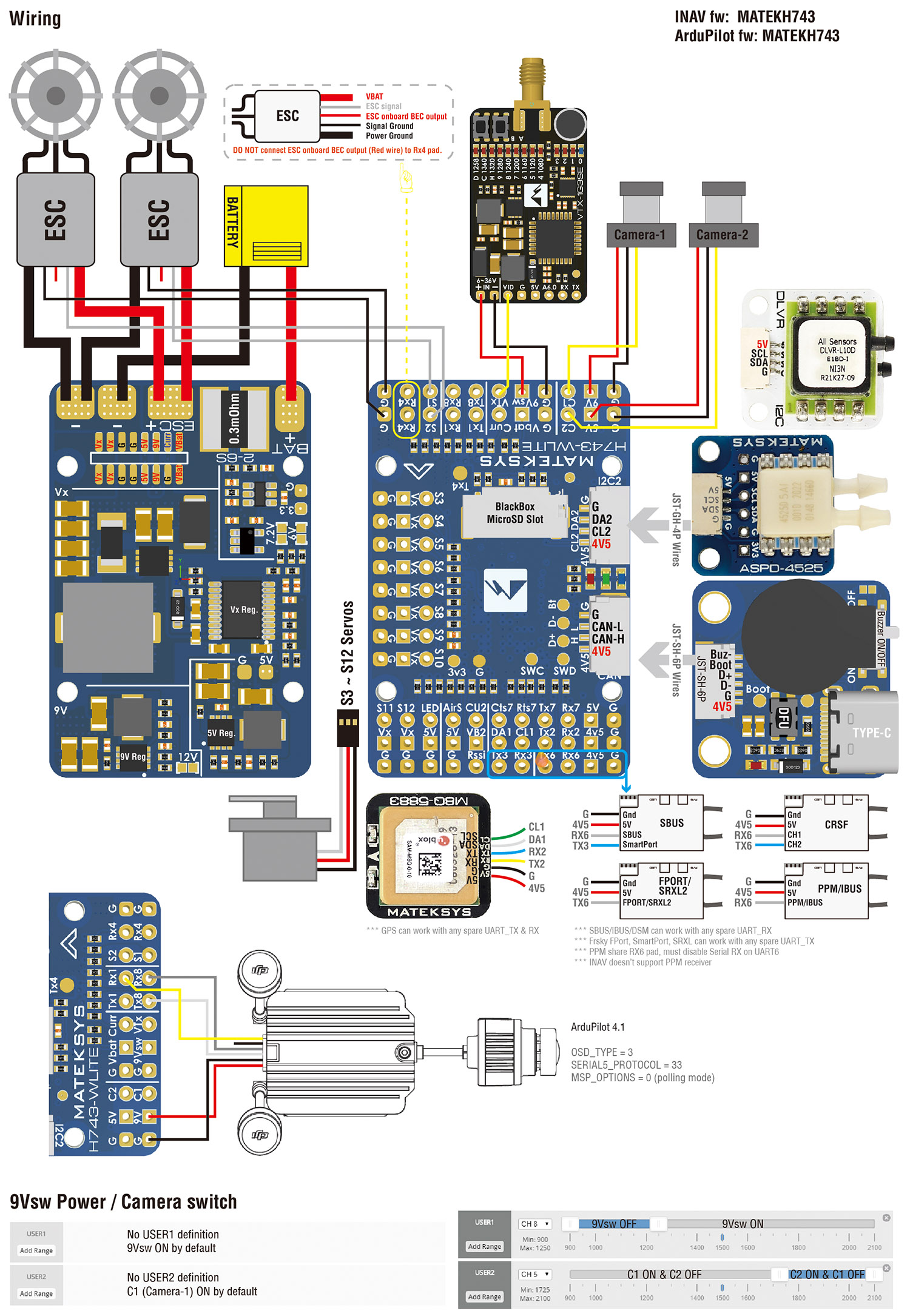
FC Firmware
- INAV: MATEKH743
- ArduPilot: MATEKH743
PDB
- Input voltage range: 6.8~30V (2~6S LiPo)
- 1x ESC power pads
- Battery Voltage divider 1K:20K (Scale 2100 in INAV, BATT_VOLT_MULT 21.0 in ArduPilot)
- Current Senor: 220A, 3.3V ADC (Scale 150 in INAV, 66.7 A/V in ArduPilot)
- Sense resistor: 90A continuous, 220A peak
BEC 5V output
- Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed
- Continuous current: 2 Amps, Max.3A
BEC 9V /12V output
- Designed for Video Transmitter, Camera, Gimbal ect.
- Continuous current: 2 Amps, Max.3A
- 12V option with Jumper pad
- for stable 9V/12V output, input voltage should > output voltage +1V
BEC Vx output
- Designed for Servos
- Voltage adjustable, 5V Default, 6V or 7.2V via jumper
- Continuous current: 8 Amps, Max.10A
- for stable Vx output, input voltage should > Vx voltage +1V
BEC 3.3V output
- Designed for Baro / Compass module and external 3.3V peripherals
- Linear Regulator
- Continuous current: 200mA
Physical
- Mounting: 25 x 25mm, Φ2mm
- Dimensions: 44 x 29 x 14.5 mm
- Weight: 22g w/ USB/buzzer adapter
Including
- 1x H743-WLITE
- 1x USB(Type-C)/Beep (Passive buzzer) Extender
- 1x 20cm JST-SH-6P to JST-SH-6P cable for USB extender.
- 2x 20cm JST-GH-4P to JST-GH-4P cable for CAN & I2C port
- 1x Rubycon ZLH 35V 470uF capacitor
- Dupont 2.54 pins (Board is shipped unsoldered)
Sehr schnelle Lieferung, ...
Sehr schnelle Lieferung, Artikel war ausreichend sicher verpackt. Die Funktionalität des Artikels ist sehr gut, so wie ich mir das vorgestellt hatte.
G. Leonhardt
Hersteller gemäß (GPSR (EU)2023/988):
Matek Systems Limited, Rm 1501 Grand Millennium Plaza 181 Queen S Road Central Hong Kong mateksys.com
Inverkehrbringer:
Premium-Modellbau Würch GmbH, Geschäftsführer: Steffen Würch, Torenstrasse 9, 88709 Meersburg, Deutschland, Tel: 07046 38795100, www.premium-modellbau.de
Sehr schnelle Lieferung, ...
Sehr schnelle Lieferung, Artikel war ausreichend sicher verpackt. Die Funktionalität des Artikels ist sehr gut, so wie ich mir das vorgestellt hatte.
G. Leonhardt






























")








 Flightcontroller")
 Standard Set - 20183")
 Standard Set - 20179")







")
")
")