Holybro Jetson Baseboard für Pixhawk 6X - 11072








Prices incl. VAT plus shipping costs
Free Shiping within Germany
In Stock
Delivery time appr. 1-3 workdays within Germany
- Order number: PM-6419
- Hersteller: Holybro
- Artikelname: 11072
- EAN: 4250902363192
Holybro Jetson Baseboard für Pixhawk 6X - 11072
Es handelt sich um das reine Baseboard ohne jegliche weitere Hardware.
Zum Betrieb wird noch ein Pixhawk 6X Flightcontroller sowie ein Jetson Orin und weiteres Zubehör (BEC, SSD, ...) benötigt.
Das Set ist z.B. als Upgrade von bisherigen Baseboards oder zur Nutzung eines bereits vorhandenen Orin vorgesehen.
Passende GPS Module finden Sie in unseren anderen Angeboten (z.B. Holybro M9N, M10, Holybro F9P, uvm.).
Lieferumfang
Holybro Jetson Baseboard für Pixhawk 6X - 11072
Ausführliche Informationen und Technische Daten:

Description
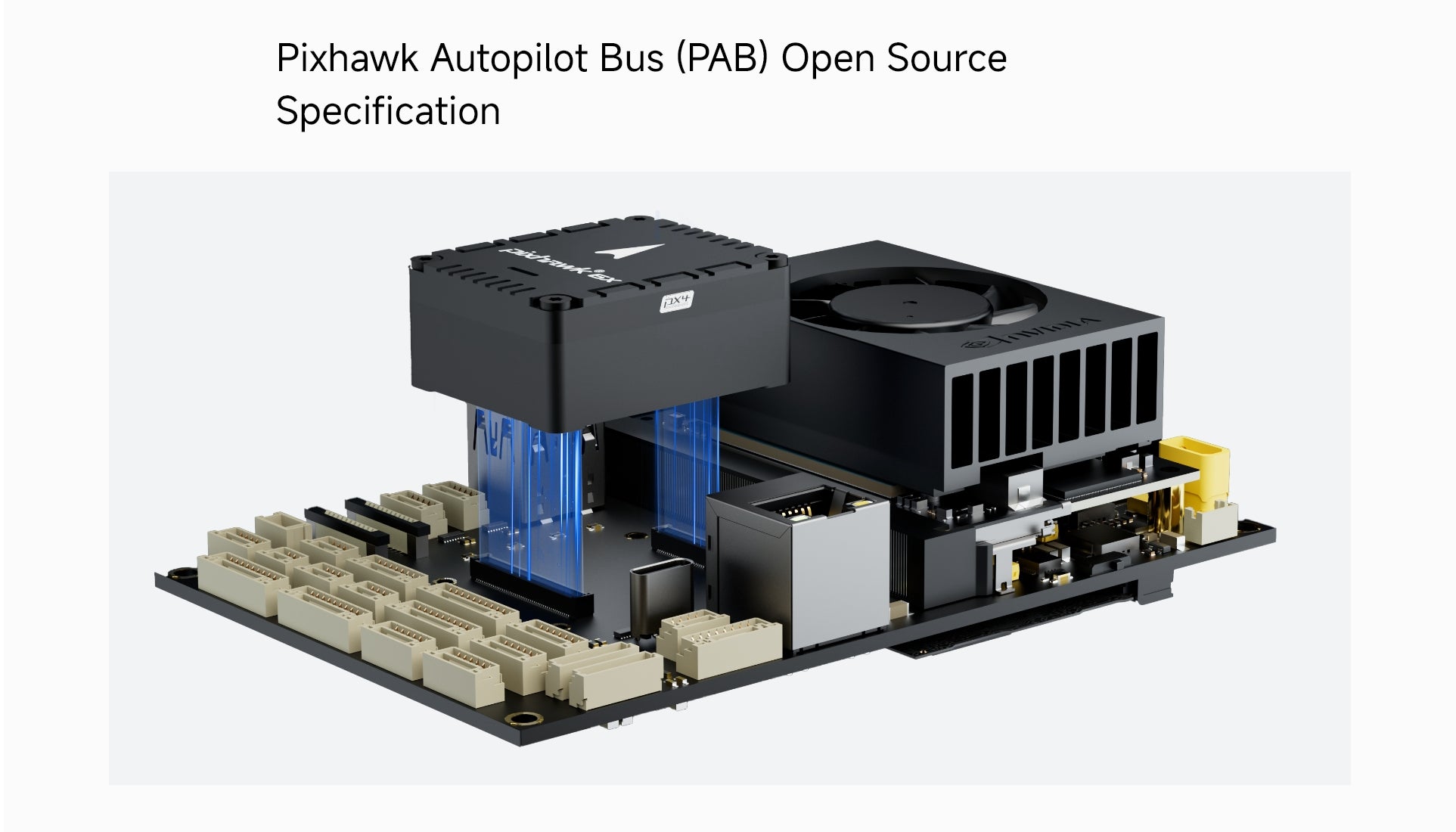
The Holybro Pixhawk Jetson Baseboard is based on the Pixhawk Autopilot Bus open source specification and the NVIDIA Jetson Orin NX/Nano Carrier Board. The Pixhawk Autopilot Bus (PAB) Form Factor enables this to be used with any PAB flight controller such as the Pixhawk 6X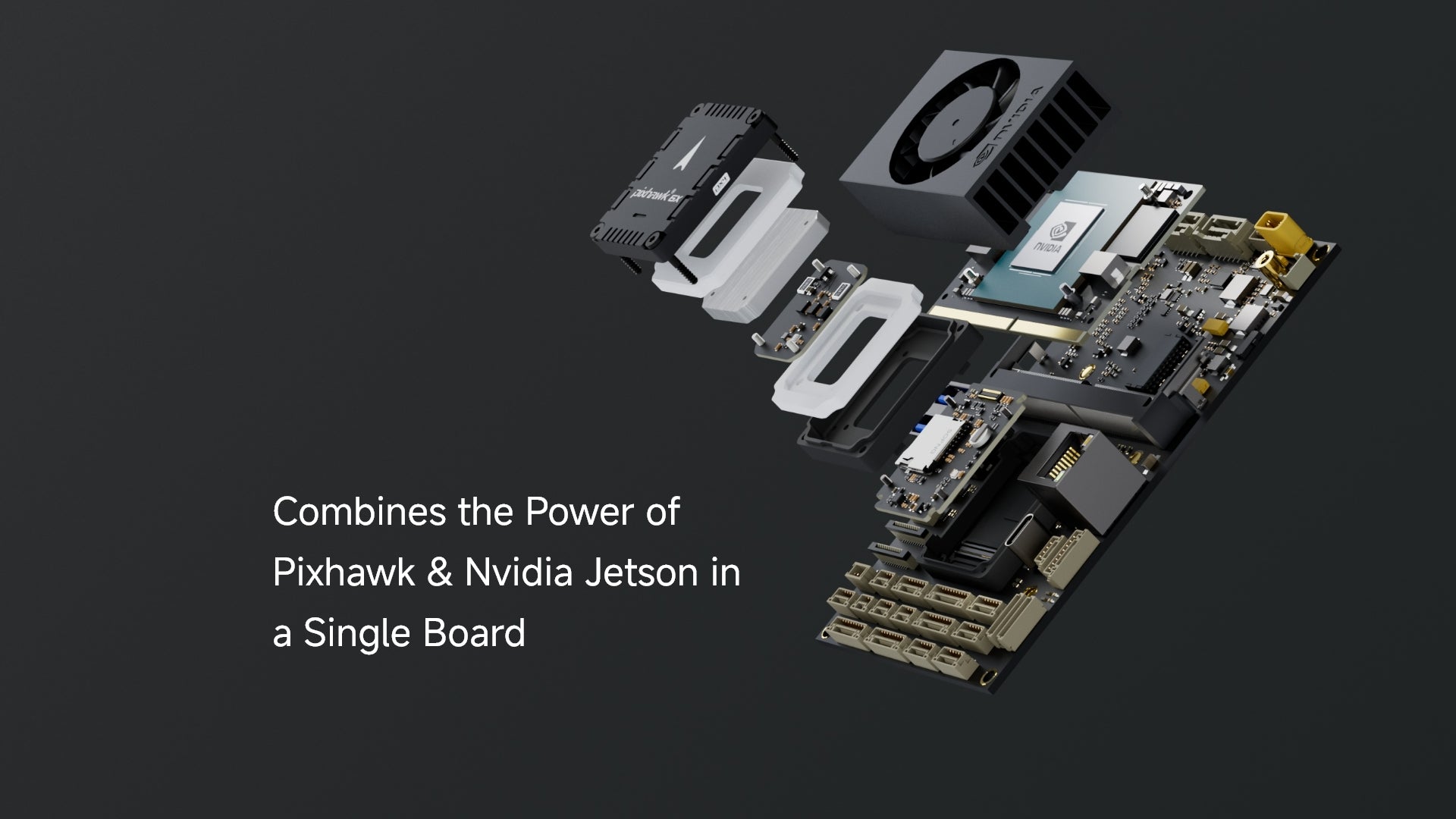




Baseboard Port & Connection
Jetson Connectors
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-pin JST-GH
- RJ45
- 2x MIPI CSI Camera Inputs
- 4 Lanes each
- 15-Pin Raspberry Pi Cam FFC
- 2x USB 3.0 Host Port
- USB A
- 5A Current Limit
- 2x USB 2.0 Host Port
- 5-Pin JST-GH
- 0A Current Limit
- USB 2.0 for Programming/debugging
- USB-C
- 2 Key M 2242 for NVMe SSD
- PCIEx4
- 2 Key E 2230 for WiFi/BT
- PCIEx2
- USB
- UART
- I2S
- Mini HDMI Out
- 4x GPIO
- 6-pin JST-GH
- CAN Port
- Connected to Autopilot’s CAN2 (4 Pin JST-GH)
- SPI Port
- 7-Pin JST-GH
- I2C Port
- 4-Pin JST-GH
- I2S Port
- 7-Pin JST-GH
- 2x UART Port
- 1 for debug
- 1 connected to Autopilot’s telem2
- Fan Power Port
- IIM42652 IMU
- Input Power
- XT30 Connector
- Voltage Rating: 7V-24V (3S-4S)
- Separate input power circuits than the Autopilot to ensure flight safety
- Holybro UBEC can be used for application above 4S
- Note: The Pixhawk Jetson Baseboard has an integrated UBEC to convert 7V-24V to 5.5V for the Jetson. Using an external UBEC alongside the integrated one provides redundancy and easier replacement in case of BEC failure.
- Power Requirements
- 8V/3A Minimum
- Depends on Usage and Peripherals
Autopilot Connectors
- Pixhawk Autopilot Bus Interface
- 100 Pin Hirose DF40
- 50 Pin Hirose DF40
- Redundant Digital Power Module Inputs
- I2C Power Monitor Support
- 2x – 6 Pin Molex CLIK-Mate
- Power Path Selector w/ Overvoltage Protection
- Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Full GPS Plus Safety Switch Port
- 10-Pin JST-GH
- Secondary (GPS2) Port
- 6-pin JST-GH
- 2x CAN Ports
- 4 Pin JST-GH
- 3x Telemetry Ports with Flow Control
- 2x 6-Pin JST-GH
- 1 is connected to Jetson’s UART1 Port
- 16 PWM Outputs
- 2x 10-Pin JST-GH
- UART4 & I2C Port
- 6-Pin JST-GH
- 2x Gigabit Ethernet port
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-pin JST-GH
- RJ45
- AD & IO
- 8-Pin JST-GH
- USB 2.0
- USB-C
- 4-pin JST-GH
- DSM Input
- 3-pin JST-ZH 1.5mm Pitch
- RC in
- PPM/SBUS
- 5-pin JST-GH
- SPI Port
- External Sensor Bus (SPI5
- 11-Pin JST-GH
- 2x Debug Port
- 1 for FMU
- 1 for IO
- 10-Pin JST-SH
- Dimensions (Without Jetson and Flight Controller Module)
- 126x80x38mm
- Weight
- With Jetson, Heatsink, Flight Controller, M.2 SSD, M.2 Wi-Fi Module 203.2g
Hersteller gemäß (GPSR (EU)2023/988):
Holybro Limited, RM 1902 EASEY COMM BLDG253-261 HENNESSY RD WANCHAI Hongkong China Hong holybro.com
Inverkehrbringer:
Premium-Modellbau Würch GmbH, Geschäftsführer: Steffen Würch, Torenstrasse 9, 88709 Meersburg, Deutschland, Tel: 07046 38795100, www.premium-modellbau.de




 19006")




 mit 6V / 7,2 / 8V / 9,2V Output - 15026")















")
 11072A")
 30182")
 Standard Set - 20183")




")



















 Flightcontroller")
 Standard Set mit ADS-B Carrier Board")




